This is the final project for the Udacity's Robotics Software Engineer Nanodegree. Its objective is to test the overall knowledge gained during the program, it therefore consists of the following pieces:
- Building a simulation world using Gazebo simulator,
- Robot localization using AMCL,
- Simultaneous Localization and Mapping (SLAM) using gmapping package,
- Motion planning using the ROS Navigation stack,
- Building robotic software using ROS features.
The above pieces are combined to simulate a home service robot capable of picking virtual objects from their pickup location and transporting them to a predefined drop-off location while simultaneously avoiding obstacles.
.
├── add_markers # add_markers package
│ ├── launch
│ │ └── add_markers.launch
| | └── add_markers_test.launch
│ └── src
│ | ├── add_markers.cpp
│ | └── add_markers_test.cpp
| └── ... ...
├── images # media files
| └── ... ...
├── pick_objects # pick objects package
│ ├── launch
│ │ └── pick_objects.launch
│ └── src
│ | ├── pick_objects.cpp
| └── ... ...
├── scripts # shell scripts files
│ ├── add_markers.sh
│ ├── home_service.sh
│ ├── pick_objects.sh
│ ├── test_navigation.sh
│ └── test_slam.sh
├── service_bot # service bot package
│ ├── config # navigation stack config files
| | ├── _MACOSX
| | | └── ... ...
| │ ├── base_local_planner_params.yaml
| │ ├── costmap_common_params.yaml
| │ ├── global_costmap_params.yaml
| │ └── local_costmap_params.yaml
│ ├── launch # amcl launch file
│ │ └── amcl.launch
│ └── maps # map files
│ | ├── myMap.pgm
| | ├── myMap.yaml
| | └── ... ...
| └── ... ...
├── slam_gmapping # gmapping package
│ ├── gmapping
| | ├── launch
| | | └── slam_gmapping.launch
| │ └── ... ...
│ └── ... ...
├── teleop_twist_keyboard # teleop twist keyboard
│ |── teleop_twist_keyboard.py
│ └── ... ...
├── turtlebot3 # turtlebot3
│ |── turtlebo3_description
| | ├── urdf
| | | ├── turtlebot3_burger.urdf.xacro
| | | └── ... ...
| │ └── ... ...
│ |── turtlebo3_gazebo
| │ ├── launch
| | | ├── turtlebot3_world.launch
| │ │ └── view_navigation.launch
| │ └── worlds
| │ ├── new_world.world
| | └── ... ...
│ └── turtlebo3_navigation
| ├── rviz
| | └── turtlebot3_navigation.rviz
| └── ... ...
└── README.md
- Ubuntu 18.04 or later,
- ROS melodic or later,
- Gazebo 9.0 or later,
- CMake and gcc/g++,
- Follow this link to create a catkin workspace.
-
Clone the repo within the src folder of your catkin workspace
$ git clone https://github.com/yabdulra/Home_Service_Robot.git -
Change directory to
catkin_wsand build.$ cd .. $ catkin_make
The shell scripts in the scripts directory provides a number of tasks that can be performed. What follows is a brief demo of how to perform each of these tasks using the scripts.
-
The test_slam script is launched using
./test_slam.shfrom the scripts directory. It launches files in the following order:roslaunch turtlebot3_gazebo turtlebot3_world.launchto launch the robot in the provided simulation world,roslaunch gmapping slam_gmapping.launchto launch to gmapping node,roslaunch turtlebot3_gazebo view_navigation.launchto launch rviz for map visualization,rosrun teleop_twist_keyboard teleop_twist_keyboard.pybrings up a keyboard to maually control the robot.
Move the robot carefully using the teleop keyboard to build a complete map of the environment. Once the complete map is built, save it using
rosrun mapserver mapsaver -f <-map_name->. The image below shows the map built by driving the robot in the environment.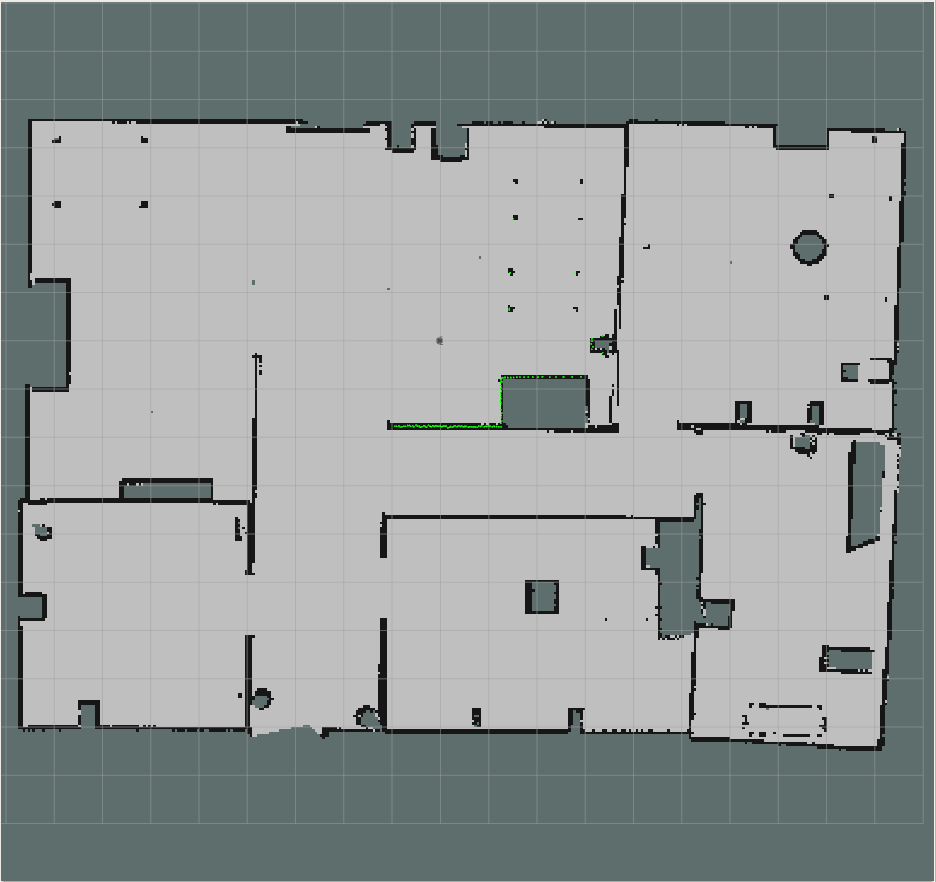
-
Test_navigation uses the map built by test_slam to launch amcl and the navigation stack. The
test_navigation.shscript launches files in the following order:roslaunch turtlebot3_gazebo turtlebot3_world.launchto launch the robot in the provided simulation world,roslaunch service_bot amcl.launchto launch amcl and the navigation stack,roslaunch turtlebot3_gazebo view_navigation.launchto launch rviz for map visualization.
Use the
2D Nav Goalon the tools panel on RVIZ to send to navigation goals, one at a time to visualize the robot move to the set goal locations. A sample video(2.5 times speed) in this link shows the robot moving to the set goal locations. -
The
pick_objects.shbuilds on thetest_navigation.shscript to launch a node that sends predefined goal poses (pickup and drop-off goals) to the robot to simulate the movement of the robot from initial pose to the pickup location, and finally to the drop-off location. The image below shows the steps taken by the robot to move from pickup location to the drop-off location.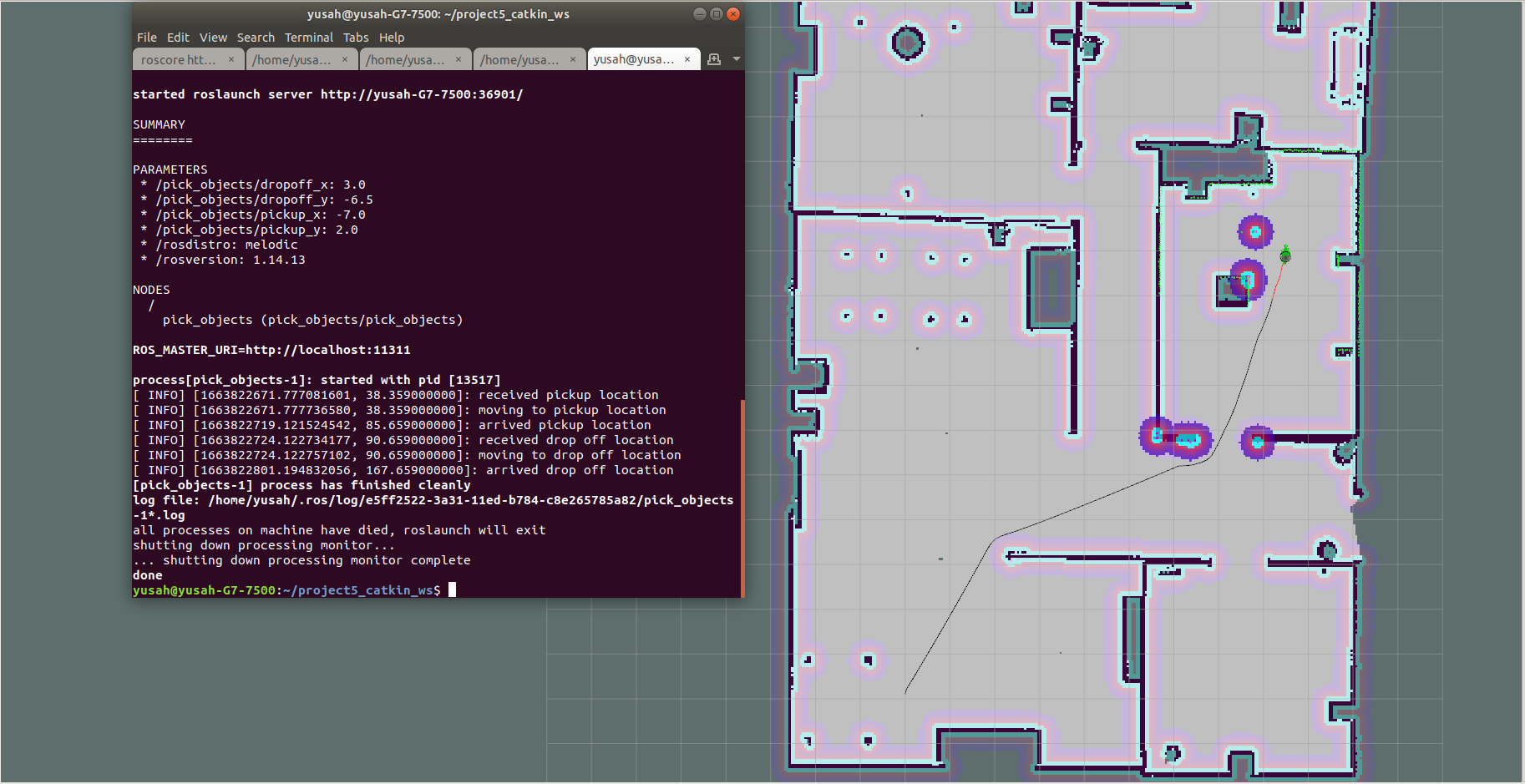
-
The add_markers package creates virtual objects with markers in rviz. To test this functionality, add_markers_test.cpp node is used to publish objects on rviz at the pickup location. The object is picked after a 5s delay, and published at its final location after another 5s.
add_markers.shis used to launch the necessary packages to achieve this task. The figure below shows the virtual object (square-green marker) with actions displayed on the terminal.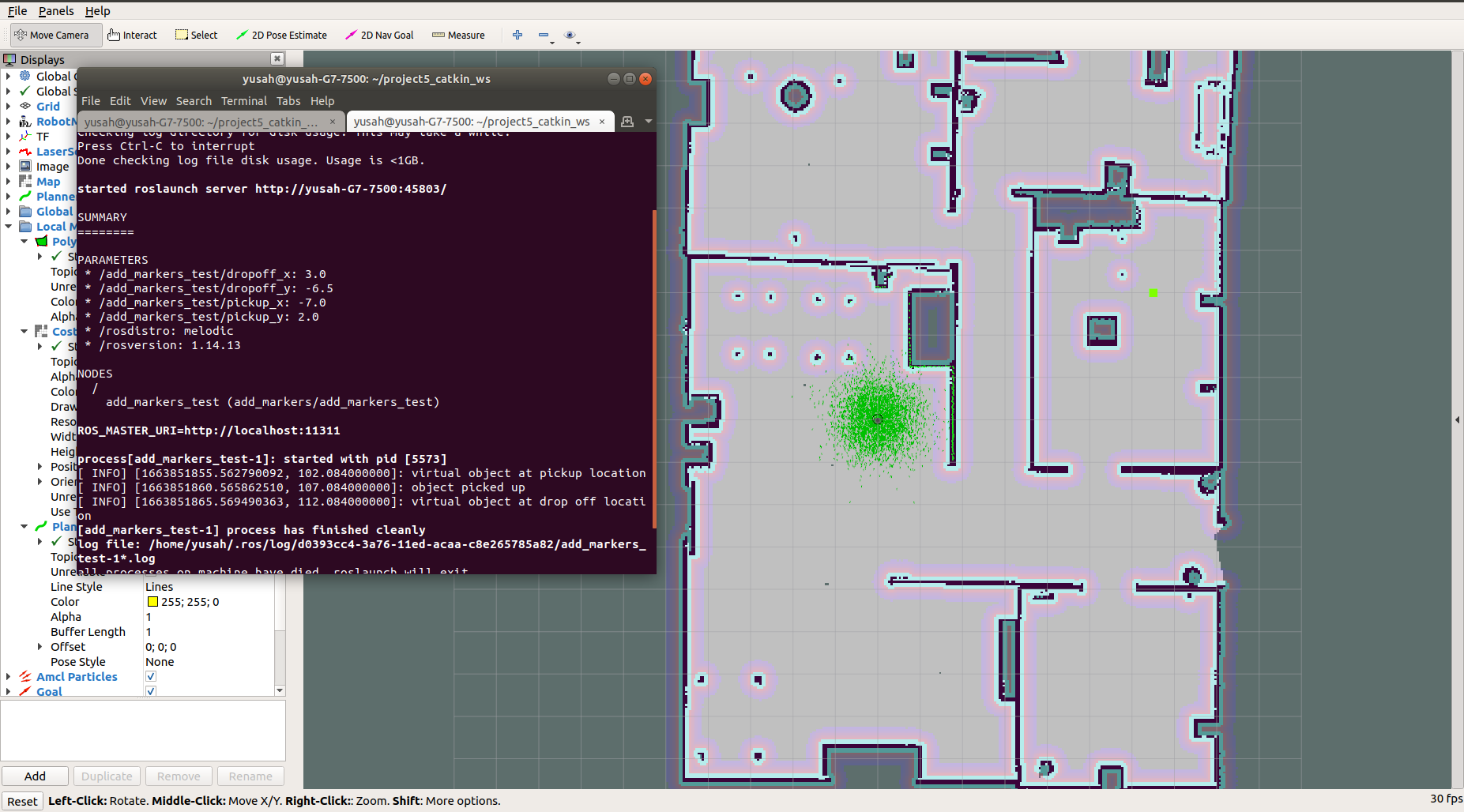
-
To integrate the pieces together and simulate a full home service robot, communication is eastablished between the add_markers node the pick_objects node. Virtual object is published at the pickup location which disappear (assumed to have been picked up) once the robot arrives the pickup location. The robot then moves to deliver the object which appears at the final goal as soon as the robot reaches the goal.
home_service.shis used to launch the necessary packages to simulate the home service robot. A sample video in this link shows the robot delivering object from pickup to drop-off locations.


