In this repository, we aim to build a high-precision automatic calibration tool for Livox-LiDAR-Camera system using a printed chessboard.
For non-commercial research use. Please cite our Optics Express paper when use it, and it can be downloaded here:
@article{RCLC, author = {Zhengchao Lai and Yue Wang and Shangwei Guo and Xiantong Meng and Jun Li and Wenhao Li and Shaokun Han} number = {10}, pages = {16242--16263}, publisher = {OSA}, title = {Laser reflectance feature assisted accurate extrinsic calibration for non-repetitive scanning LiDAR and camera systems}, volume = {30}, month = {May}, year = {2022}, url = {http://opg.optica.org/oe/abstract.cfm?URI=oe-30-10-16242}, doi = {10.1364/OE.453449} }
-
Grid fitting process:
-
Reproject results: point cloud to image ( more than 100m distance, toward pixel-wise align precision ):
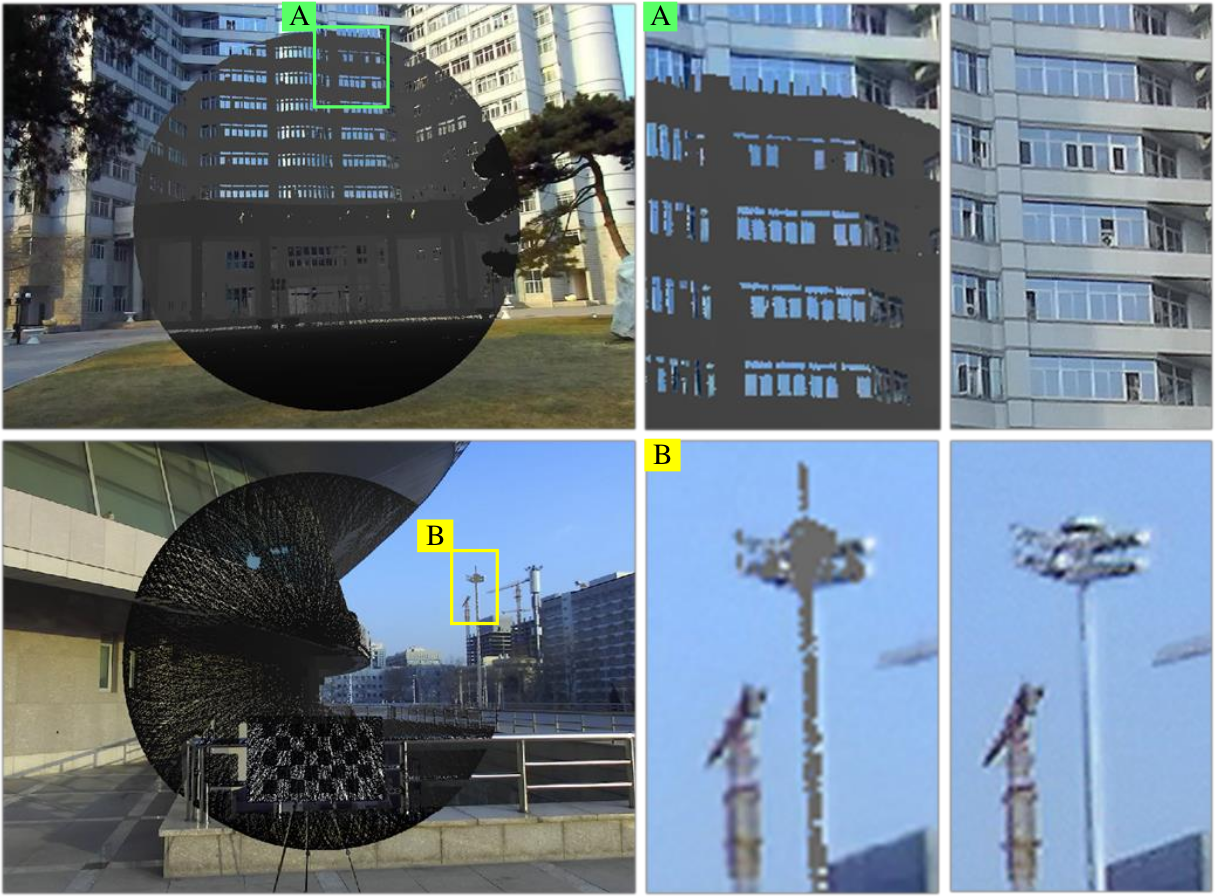
-
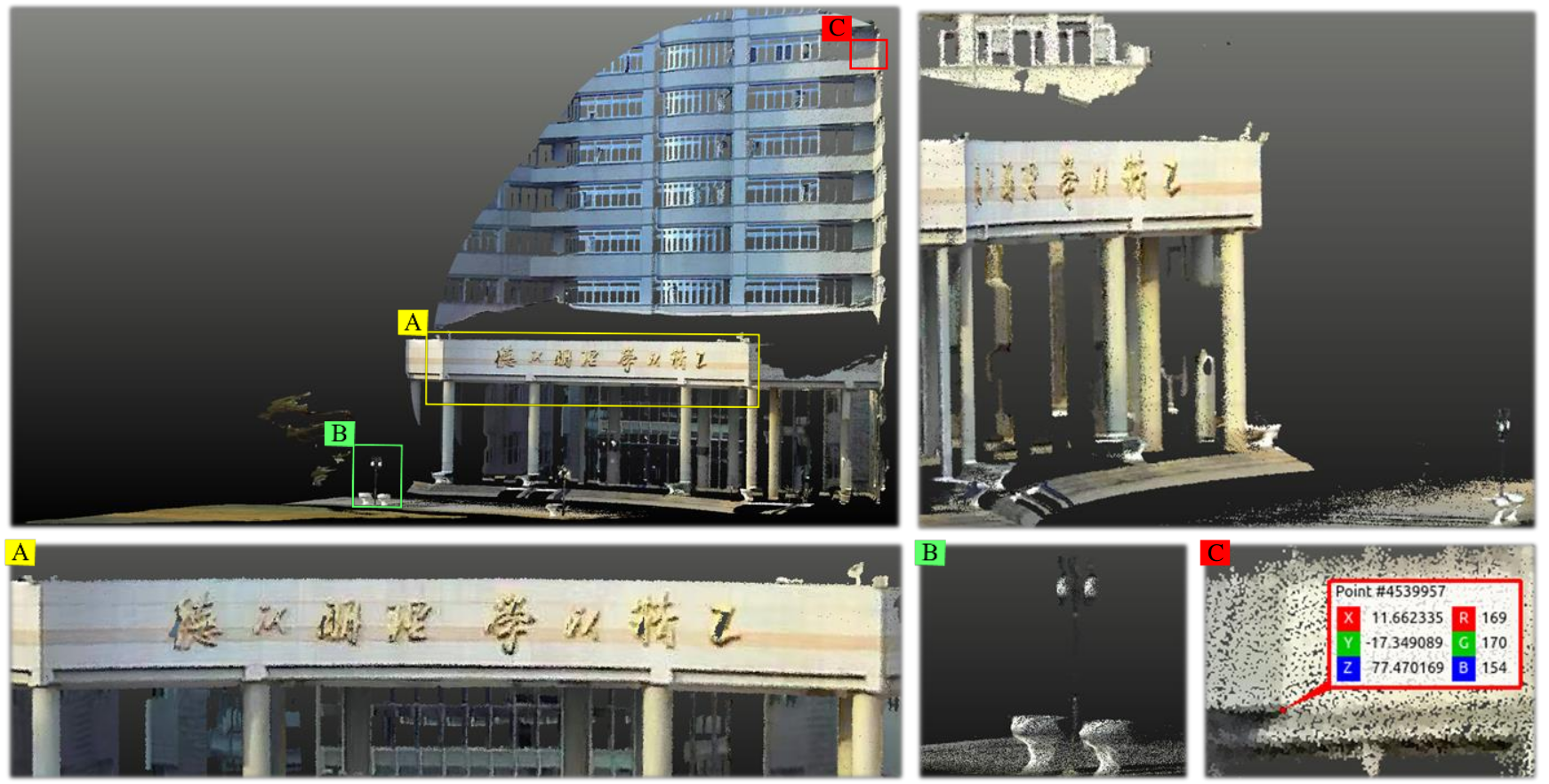
Reproject results: image pixel map to point clouds:



- PCL (>1.7)
- Eigen3(3.3.4)
- OpenCV (>3.0)
- ceres
-
Configure
data_root_pathto be the data path in fileconfig_real.yaml. -
build project:
mkdir build && cd buildcmake .. && make -
Segment the chessboard from pointcloud.
./BoardSegmentation -
Start calibrate and show the results.
./Calibrate
Indoor and outdoor calibration data for MID-40 and Zed2 system can be downloded at GoogleDrive


The complete code of simulation tool has been uploaded to Livox_Cam_Simulator. Some result as shown in the following figures.
-
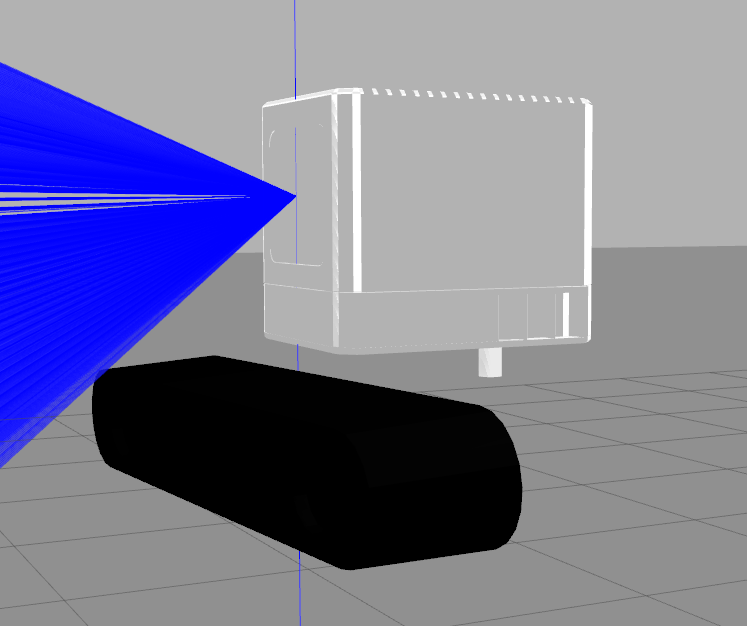
The scan model of Livox LiDAR:
-
The zed camera combined with Livox LiDAR:
-
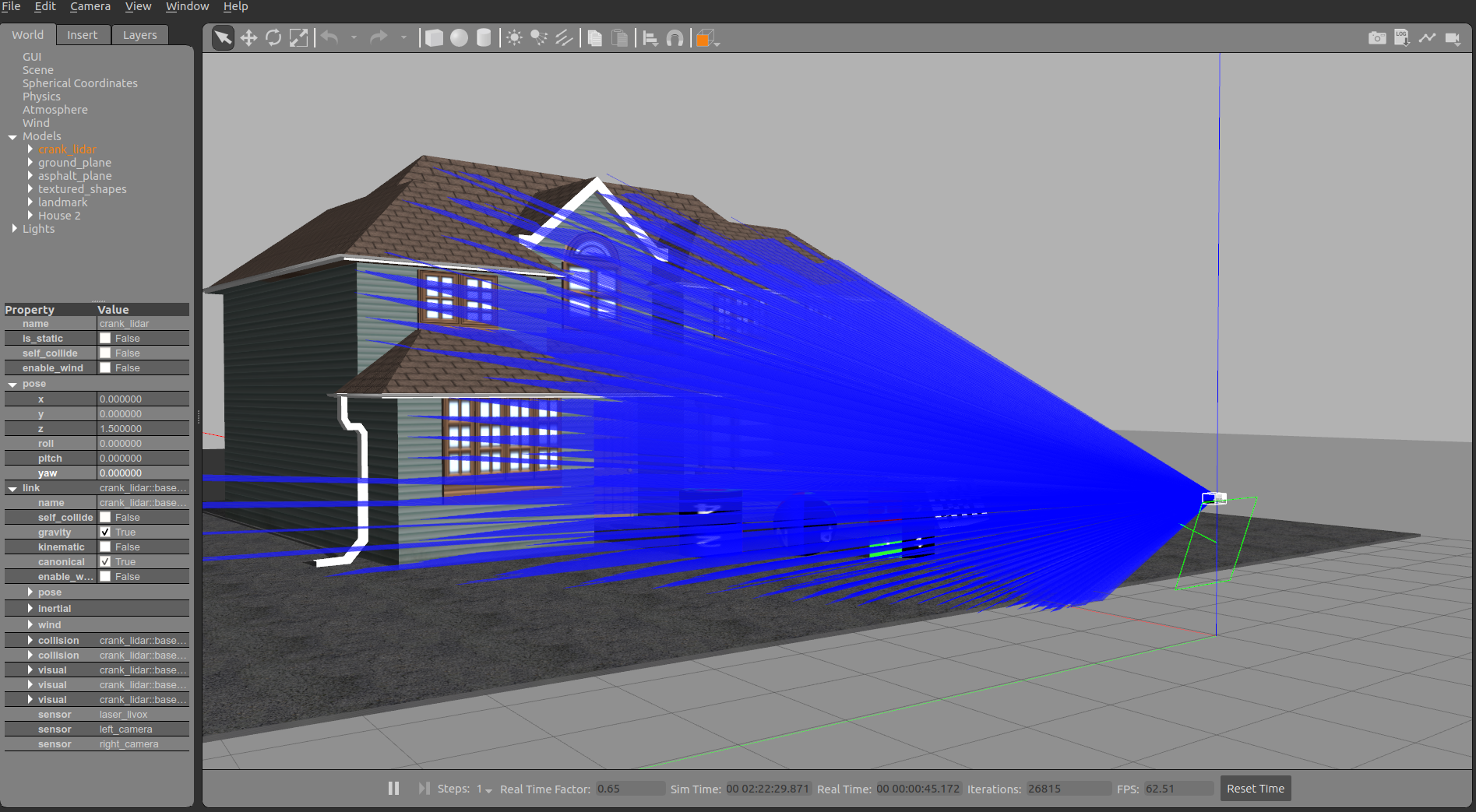
The Gazebo scene:
-
The rviz visulation:
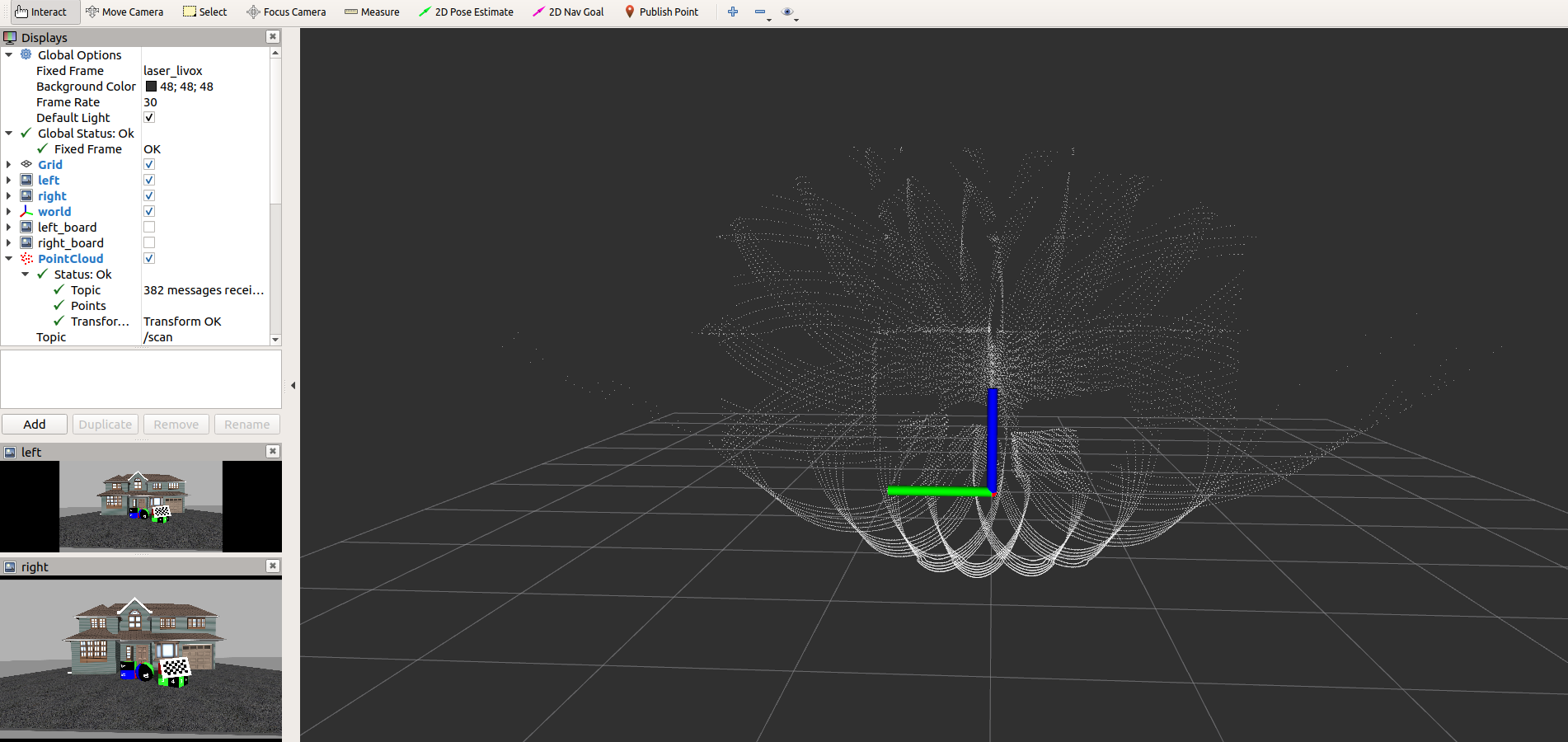




Point clouds with reflectance intensity which mapped according to the color of the materials:
