
This project consists of a automated warehouse simulation with an autonomous mobile robot that handles Orders requests to get the required Products at the Storages available and deliver them in the right Dispatch area.
This project was developed to be presented as the "Capstone Project" of Udacity C++ Engineer Nanodegree program. I chose to develop this project in the mobile robotics context with everything I've learned from the Udacity Robotic Software Engineer Nanodegree program, which I had the chance to develop a home service robot simulation (repo here) that navigates autonomously between two goals pose.
This project was built and was run on Ubuntu 18.04.5 LTS. The following dependencies/packages are required:
- gcc/g++ >= 7.5.0
- make >= 4.1
- cmake >= 2.8
- ROS Melodic
- Gazebo 9.17.0
- ROS Melodic Packages:
- amcl
- move_base
- map_server
- gmapping (optional)
- teleop_twist_keyboard (optional)
Assuming your catkin workspace catkin_ws is located in ~/, clone this repository and the official repositories bellow in src folder of your catkin workspace:
cd ~/catkin_ws/src
git clone https://github.com/rodriguesrenato/warehouse_robot_simulation.git
- Optional: If you plan to build and mapping a new map for this simulation, then also clone the following repositories:
git clone https://github.com/ros-perception/slam_gmapping.git git clone https://github.com/ros-teleop/teleop_twist_keyboard
It is also possible to install the required and optional libraries along the current ros installation via apt-get (Make sure to adjust the following commands to you ROS version):
sudo apt-get install ros-noetic-amcl
sudo apt-get install ros-noetic-move-base
sudo apt-get install ros-noetic-dwa-local-planner
sudo apt-get install ros-noetic-map-server
sudo apt-get install ros-noetic-teleop-twist-keyboard
sudo apt-get install ros-noetic-gmapping
sudo apt-get install ros-noetic-slam-gmapping
- Note: If a different project directory was chosen, then you have to manually change the
projectDirectoryvalue in thesrc/warehouseSimulation.cppfile before build it. It was considered that ROS executes nodes in~/.rosto use relative paths.
Then build and source it:
cd ~/catkin_ws
catkin_make
source devel/setup.bash
Xterm were used to execute launch files individually. If you dont have it installed, then run:
sudo apt-get install xterm
Finally, make script files executable before run them:
cd ~/catkin_ws/src/warehouse_robot_simulation/scripts
chmod +x *.sh
To run the simulation, there are two options:
-
Open a terminal in the
scriptsfolder and runwarehouse_simulation.sh:./warehouse_simulation.sh -
Or launch the following
.launchfiles in the specified sequence:roslaunch warehouse_robot_simulation world.launch: Launch Gazebo and load the worldwarehouse.worldfile.roslaunch warehouse_robot_simulation robot_spawner.launch: Spawn the robot in the simulation.roslaunch warehouse_robot_simulation amcl.launch: Start AMCL and move_base nodes.roslaunch warehouse_robot_simulation warehouse_simulation.launch: Start the warehouse simulation.
The only way to interact externally with the simulation is to publish an Order message via ROS topic /warehouse/order/add. Order message will be received by the running OrderController.
The simplest way is to directly publish a message to ros in the terminal. The Order is defined as a one line plain string following this pattern: target_dispatch_model_name product product_quantity product_n product_n_quantity
So to publish the following example Order: DispatchA ProductR 3 ProductG 5, then run on a terminal:
rostopic pub /warehouse/order/add std_msgs/String "data: 'DispatchA ProductR 3 ProductG 5'"-
The command line above will place an
Orderin the simulation that contains 3ProductRand 5ProductGto be dispatched atDispatchA. -
The following model objects available for build orders:
- Products:
ProductR,ProductGandProductB - Dispatches:
DispatchAandDispatchB
- Products:
-
If you try to send an Order with invalid Dispatch, Product or quantity, this order will be discarded internally by the simulation.
To end the simulation, just hit CTRL+C on the terminal that is running WarehouseSimulation node and wait until it finishes the shutdown procedure.
If you want to check the navigation in rviz, run:
roslaunch warehouse_robot_simulation view_navigation.launch
If you want to generate a new map files using SLAM gmapping, follow the step bellow:
-
Open terminal in scripts fodler and run the mapping script:
./mapping_slam.sh- It launches the world and robot in Gazebo, then runs
slam_gmapping.launch
- It launches the world and robot in Gazebo, then runs
-
Navigate robot using teleop keyboard through your map until cover most of the areas. If the generated map showed in Rviz isn't good enough, adjusts gmapping params in
slam_gmapping.launchfile and restart this process. -
If the generated map showed in Rviz is good enough, open a new terminal, change director to the
mapfolder of this project, then save your new map by running the following command:
rosrun map_server map_saver -f warehouse.
The simulation has the following main components:
- Warehouse world in Gazebo
- URDF Robot
- AMCL and Navigation nodes
- WarehouseSimulation ROS node

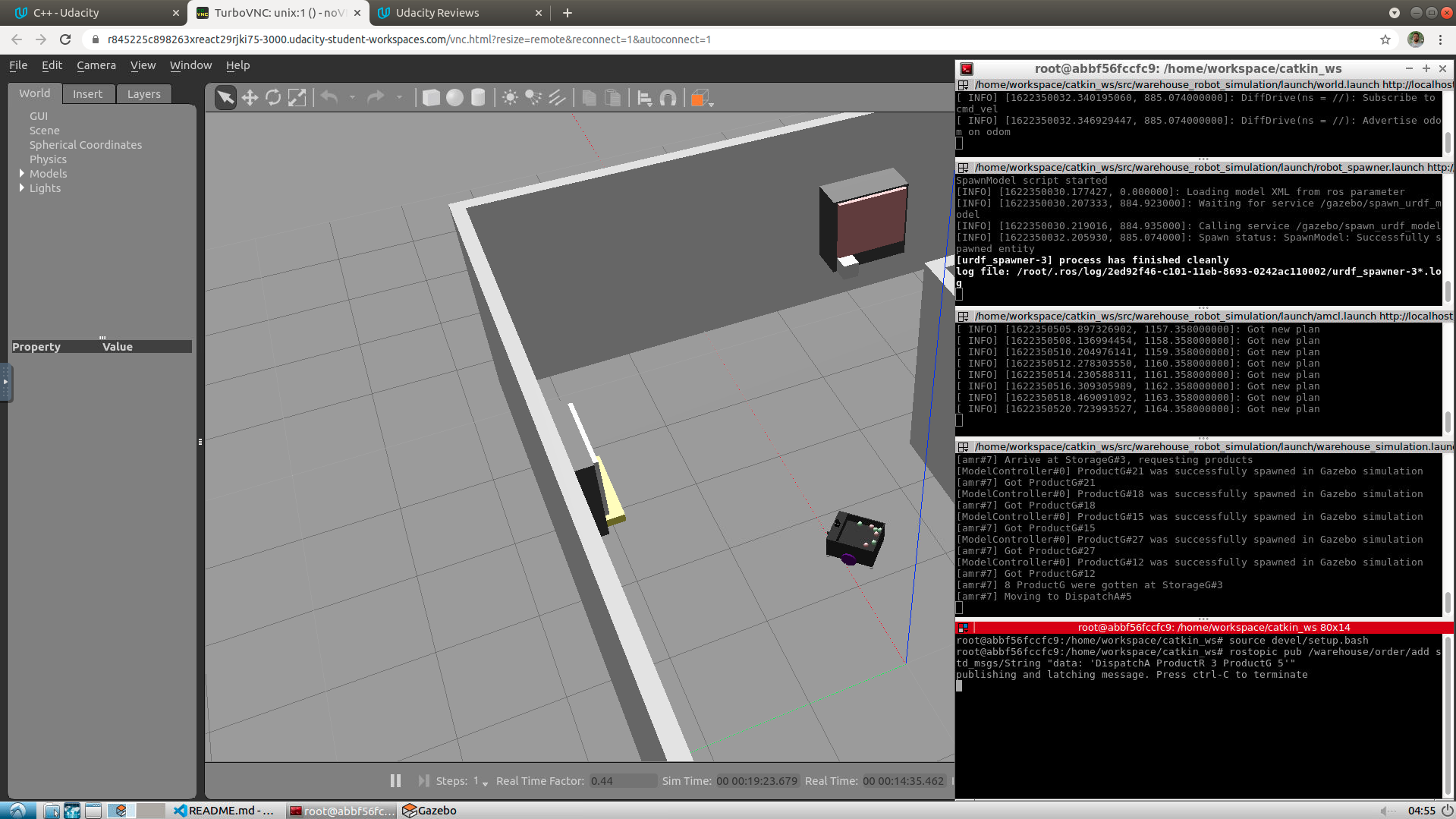
The world was built in a simplified version of a warehouse and was designed in a way that Storages area will be at the right side of the image above and Dispatch areas on the left, so robot will have to navigate through aisles to get the products and deviler them on the left side of the open area, similar to some logistics warehouse configurations.

The robot was designed in a two wheeled configuration with ball caster wheels at edges, a cargo bed at the back and two sensors for mapping and localization (camera and Lidar).
It was built using URDF format and .xacro files, based and improved from my previous project home_service_robot by adding some macro functions to help adusting parameters and calculating inertial values.
These nodes were based on home_service_robot project.
SLAM gmapping package were used to build the warehouse map. The map is loaded with map_server package, the localization is done with AMCL package and navigation with move_base package.
Navigation parameters were based on the koburi/turtlebot navigation parameters as a starting point and they were tuned for this application. The inflation_radius param was increasead to avoid naviagation too close to the walls and ground objects
This is the main simulation node and was developed using ROS with C++. All objects in the simulation are instantiated/handled in the warehouseSimulation node, except the robot and localization/navigation nodes that has to be launched previously. The list bellow shows the node main operation flow.
-
Initialize the WarehouseSimulation node and create the warehouse controllers and objects.
-
All SDF models that will be used in the simulation are loaded and its file content stored in a dictionary of
modelname:fileContentby the modelController class. The model files can be found atmodels/warehouseObjectsfolder. -
Read the storages and dispatches configuration files to add Storage and Dispatch objects to the simulation. These objects are defined on each line in the configuration files. InstatiateWarehouseObjects function process these configuration files line by line, construct the correspondent object with the values read and push it back to the correspondent object's vector. If any exception/problem occurs during this process, the simulation is aborted.
-
Create a
Robotobject and configure it. The simulation was made to handler multiple robots, but in this current version just one robot is used. CheckRobotconstructor for more information about the parameter needed to set multipleRobots. -
Iterate over each
Storage,DispatchandRobotcreated in order to Start Operation threads and/or spawn it's object model in Gazebo simulation.StorageOperation thread is responsible for keepingStorageproducingProductsto it's max capacity.RobotOperation thread is responsible for cycle through tasks to executeOrdersand interact with all other warehouse objects. -
Set a ROS subscriber at topic
warehouse/order/addto receiveOrderrequests and send it toOrderController::AddOrder. This subscribe function opens a new thread internally to call the AddOrder member function ofOrderController, which is passed as reference. -
Set a new
SIGINThandler to let the simulation callModelController::Deleteof all models that were previously spawned before a complete ros shutdown.ros::initat step 1. was set with the flagros::init_options::NoSigintHandlerto let a custom handler be set. -
A while loop keeps calling
ros::spinOnce()to process a single round of ROS callbacks until global variableisShutdownis set or ROS shutdown. -
When CTRL+C is hit,
isShutdownis set true, iterates over all Storage, Dispatch and Robot to call delete models from Gazebo simulation -
After Delete spawned models in Gazebo, then completely shutdown this ros node by calling
ros::shutdown()
A brief explanation of each implemented class
- Program C++ Classes
- WarehouseObject
- Robot
- Storage
- Dispatch
- Product
- Order
- OrderController
- ModelController
This is the base class for all objects and controller of this simulation. It is responsible for generating a unique id, printing messages in the terminal protected by a mutex through Print() member function, retrive it's unique name through GetName() and storing all started threads in a vector to build a thread barrier on it's Destructor. It was implemented a way of programatically end objects (Storage and Robot) member functions that were started in threads (explained in next sections).
In this simulation, a two wheeled mobile Robot is used. It has a cargo bed at the back to carry Products, a Lidar and camera sensors to localize itself in the enviroment and navigate, and it can interact with other Warehouse Objects.
The Robot class has a member functions to set/return it's status, return a list of Product names that is in the cargo bed and the StartOperation member function responsible for start a thread running Operate(). It also has private member functions that builds a vector of Storages that have the Products in the current order; interacts with SimpleActionClient to move the robot; and operate robot throught RobotStatus.
In the Operate() private member function, a state machine of RobotStatus was implemented, which runs continuously until _status be set as offline. Each RobotStatus is responsible for a task listed bellow. Some operation variables are created before the state machine scope to be persistent between states looping. It was made with this strategy to continuously check if the robot _status was set to offline and then terminate this thread. When Robot Destructor is called, it set _status to offline.
Available RobotStatus tasks:
-
offline: Robot is not operable and shutdown. -
startup: Initialize the SimpleActionClient and wait until it gets ready to change the _status torequestOrder. -
standby: Just wait until _status change. -
requestOrder: Request OrderController an Order and change _status toprocessOrderif got one. -
processOrder: Clear operation variables, get the list of Storages to get Order Products and get the target Dispatch shared pointer. If it couldn't find any Storages to go or a valid Dispatch, then set _state tocloseOrder. -
plan: at this state, set the next target Storage, remove this Storage from storagesToGo vector and set _state tomoveToStorage. If storagesToGo gets empty, then set _state tomoveToDispatch. -
moveToStorage: Move robot to the Storage product output pose. If it reaches the goal, then set _status torequestProduct, otherwise try again in next state machine interation. -
requestProduct: CallRequestProduct()member function of the target Storage until the gets the number of valid Products specified in the Order.RequestProduct()return a unique_ptr that will be moved to Robot_cargoBinProductsattribute, passing Product's ownership from Storage to Robot. When the storage don't have a Product available, it will return a nullptr, that will not be counted and added to_cargoBinProducts. -
moveToDispatch: Move robot to the Dispatch product picking pose. If it reaches the goal, then set _status todispatchOrder, otherwise try again in next state machine interation. -
dispatchOrder: Call target DispatchPickProduct()member function moving Products in_cargoBinProductsone by one, passing Product's ownership from Robot to Dispatch, until_cargoBinProductsgets empty. After that, set _status tocloseOrder. -
closeOrder: Close this order and set _state torequestOrderto request a new one.

The Storage class is responsible for Products production, storage and handling, defined on the class Constructor.
The Production() private member function continuously produces a specified Product until gets max capacity. This function is started in a thread by StartOperation public member function.
The RequestProduct() public member function handles Products requests to spawn a Product at a specified Product Output Pose. It returns a std::unique_ptr<Product> that was produced, passing the ownership from Storage to the caller.
It also has member functions to return it's pose and model name, and it's product output pose and model name.

The Dispatch class is responsible for picking all Order Products from robot when requested by it's PickProducts() member function.
It also has member functions to return it's pose and model name, and the pose to pick product.

The Product class is a simple representation of the products that will be handled during this simulation. It stores the product model name that is returned by GetModelName() member function.
The Order class represents a single Order 'recipe' that contains the target Dispatch and an unordered map of Products and the respective quantities. It also store the information of which robot name is handling this Order.
The OrderController is responsible for the management of the queue of Orders received and requested.
The Orders are added to the queue by AddOrder() member function, which is set as the callback function of the node handle subcribe function on the topic warehouse/order/add. To add an Order, publish a plain text on this topic following this sequence pattern, separating itens by a single space:
target_dispatch_model_name product product_quantity product_n product_n_quantity
Robots can request an Order in queue by calling RequestNextOrder() or RequestNextOrderWithTimeout(). In both member functions were implemented a conditional variable to wait for an Order available in the queue and avoid concurrency issues. The RequestNextOrderWithTimeout() is set an timeout time to avoid being stuck waiting for an Order and it's state machine implementation calls this function multiples times before gets the Order available. That permits the robot to do other tasks until an Order is available.
For a future implementation of a graphical orders monitor, the function GetOrdersTracking() returns all Orders that are being handled by robots. That is the reason that Orders are created as std::shared_ptr<Order>, so it will make possible for an Order be processed collaboratively between multiple robots and the main controller.
The ModelController class is responsible for interacting with Gazebo simulation .
The Add() member function reads models XML file content and store it in a unordered map associated with it's model name as the key value.
The Spawn() member function receive the unique object name, the object's model name and the desired pose for the object to be spawned. This function gets the pre loaded model XML of the desired model name previously loaded and call the GazeboSpawn() private function, which is responsible for calling a ros service on gazebo/spawn_sdf_model topic with the right parameters to spawn this object in the simulation.
The Delete() member function works likewise Spawn(), it calls GazeboDelete() private member function , which is responsible for calling a ros service on gazebo/delete_model topic for delete the object from simulation.
There is also the ReadModel() private member function that reads a file at the specified filepath, convert the whole file content to string format and return it. This function is used by Add().
-
All classes were designed and built using OOP.
-
The warehouseObject class was designed to have common features and information between all other classes, like an
objectNameand aPrint()function protected by a mutex. When the Destructor is called, it makes a thread barrier to guarantee that all started threads by the child class are finish before it goes out of scope. -
The
WarehouseObject::Print()is responsible to standarize thestd::coutoutput in the format[ObjectName] message. -
Two configuration files were created to define how many
StoragesandDispatcheswill be created and also configure each of them, so it not needed to hardcode this configurations. These files are processed in thewarehouseSimulation.cpp. -
In the files read operations, a try catch expression was set to prevent from load wrong
Storageand/orDispatchconfigurations and string to int/float exceptions. In this case, it warns the user to fix the respective configuration file and finish the simulation before spawn any model to Gazebo. -
All SDF models that will be used in the simulation are loaded and stored it's file XML content in the
ModelControllerclass to avoid read files multiple times. They are stored in a unordered_map dictionary, the keys of the content are the files name. The file name is defined as the model name. -
All classes are instantiated as shared pointers, except the
Productclass.Productsare unique objects in the simulation and only one class has to have the ownership of it, so they are always instantiated as unique pointers and std::move are used to pass its ownership between warehouse objects. -
The shared pointers of classes created are copied to local member attributes in it's Constructor, to be used inside the class by it's member functions.
-
StorageandRobotclass start threads in the simulation by it'sStartOperation()member functions.-
Storage::StartOperation()starts a thread to run the private member functionProduction(). This function runs an while loop until private attribute_productionModelNameis empty (when Destructor is called,_productionModelNameis cleared to finish this thread programatically). This loop keeps adding newunique_ptr<Product>, at a fixed rate of 2 seconds, to the private attribute_storedProductsuntil it reachs_maxCapacity. -
Storage::_storedProductsis always read/modified after a lock_guard be created withStorage::_storageMtxmutex. -
Robot::StartOperation()starts a thread to run the private member functionOperate(). This function runs an while loop until private attribute_statusis empty (when Destructor is called,_statusis set toRobotStatus::offlineto finish this thread programatically). This loop is responsible to cycle through RobotStatus tasks, designed to be a state machine behavior model. This approach was made to make possible multiple behaviours paths, accept external commands to change plans and constantly check when this thread needs to be eneded. -
Robot::_cargoBinProductsis always read/modified after a lock_guard or unique_lock be created withRobot::_cargoBinMtxmutex.
-
-
The
ModelControllerclass was built to handler everything related to Gazebo and it makes direct ros service calls to spawn and delete models form Gazebo. Due to complexity, robot spawing depends on other ros nodes like amcl and move_base, so this feature will be added in a future version. -
The
OrderControllerimplements a queue that uses a condition variable and a mutex (OrderController::_queueMtx) to handleOrderrequests protected from concurrency bugs. -
The
OrderController::AddOrder()receives a string message from ros and process it withstd::istringstreamto parse values and build theOrder. ThisOrderis added to theOrderController::_queueunder the lock usingstd::lock_guardwith theOrderController::_queueMtxmutex. -
OrderandProductclasses are just simple classes that store it's object informations and be shared/moved throught other warehouse objects. -
The
Dispatch::PickProduct()member function just receive the movedstd::unique_ptr<Product>and let thisProductdestructs at the end of scope. It's done because we don't have any action to do with thisProductlater in the simulation.
The submission must compile and run.
- To work on the Udacity workspace, some path adjusts had to be made in the script file on the declared path (sourcing kinetic instead of melodic)
- There is a screenshot of this project running on the Udacity workspace.
- Rviz visualization was removed from the script due to high processing.

The project demonstrates an understanding of C++ functions and control structures.
- The project classes were well organized accordingly to their purpose in the simulation
The project reads data from a file and process the data, or the program writes data to a file.
ModelControllerclass reads SDF model files andWarehouseSimulation.cppreads two configuration files on local functionInstatiateWarehouseObjects.
The project uses Object Oriented Programming techniques.
- All classes were uses OOP and they are used in the
warehouseSimulation.cpp.
Classes use appropriate access specifiers for class members.
- All member attributes are accessed/modified externally by accessor and mutator functions.
Classes abstract implementation details from their interfaces.
Classes encapsulate behavior.
Classes follow an appropriate inheritance hierarchy.
- All classes have
WarehouseObjectclass as parent class
The project makes use of references in function declarations.
The project uses destructors appropriately.
WarehouseObjectclass uses Destructor to build a thread barrier and wait for all started threads finish.- On
StorageandRobotclass, the Destructor is used to set a member attribute to a value that will trigger all started thread by them to terminate during their internal cycles.
The project uses move semantics to move data, instead of copying it, where possible.
- std:move is used to move
std::unique_ptr<Products>objects betweenRobot(Robot.cpp line 278, 323),Storage(Storage.cpp line 57, 60, 91) andDispatchobjects. It's also used inOrderController.cpp(line 76, 113, 412) to moveOrdersin/out the_queuemember attribute.
The project uses smart pointers instead of raw pointers.
- Shared pointers are widely used and unique pointer is used to handler
Productclass.
The project uses multithreading.
Storage.cpp(line 72) andRobot(line 76) start threads in the simulation by it'sStartOperation()member functions.
A mutex or lock is used in the project.
-
In
WarehouseObject.cpp(line 38) to print to std::cout under the lock by using the_coutMtxmutex withstd::lock_guard. -
In
Storage.cpp(lines 51, 86) to protected_storedProductsof concurrent access/modification byStorage::Production()andStorage::RequestProduct(). -
In
Robot.cpp(lines 58, 277, 322) to protected_cargoBinProductsof concurrent access/modification byRobot::Operate()andGetCargoBinProductsName(). -
In
OrderController.cpp(lines 75, 108, 132) to protect deque_queueand (lines 87, 98, 119, 148) to protect vector_ordersTrackingfrom concurrent access/modification
A condition variable is used in the project.
- It is used in
OrderController.cppto handlerOrderrequest fromRobots(lines 109, 133) and to notify when aOrderwas added to the_queue(lines 77).
- Launch robot and correspondent amcl/move_base nodes from the warehouseSimulation node
- Design a complete operational Dashboard with ncurses to keep track of all warehouse objects
- Multiple robots in simulation
- Test other path planning algorithms to define 'lanes' and a waitting line at Storages and Dispatches.
The contents of this repository are covered under the MIT License.
- Ros wiki: (http://wiki.ros.org/)
- C++ references: (https://www.cplusplus.com/)
- How to add compiler option
pthreadsin ros: (https://stackoverflow.com/questions/67300703/how-do-i-use-the-pthreads-in-a-ros-c-node)