This is the Robot Operating System (ROS) 1 package I developed during my MASc research: "Design and Evaluation of Nonverbal Motion Cues for Human-Robot Spatial Interaction".
These motion legibility cues communicate a mobile robot's forthcoming motion to pedestrians.

Images of the robot motion legibility cues:
(1) FlashingLights indicating a left turn.
(2) ProjectedArrows in Goal mode indicating a future left turn.
(3) ProjectedArrows in Path mode indicating the next immediate movement will be straight.
Notes:
- This package was only tested in the scenarios described in Chapter 3 of my thesis, for the purpose of video demonstration for human-subjects experimentation.
- The videos used during the experiments are compiled into a single video here. The videos are labelled by Cue Type, Cue Mode, and Robot Movement Scenario (see below).
- This package has been tested on Ubuntu 16 with ROS1 Kinetic and Ubuntu 18 with ROS1 Melodic.
- I assume the reader is familiar with ROS1.
- Stay tuned for a publication in the 2021 IEEE International Conference on Robotics and Automation (ICRA) - hopefully.
Contents
- Abstract
- Functionality of Robot Communication Cues
- Implementation of Robot Communication Cues
- Instructions for Running this Package
- Brief Description of Files
Mobile robots have recently appeared in public spaces such as shopping malls, airports, and urban sidewalks. These robots are designed with human-aware motion planning capabilities, but they are not designed to communicate with pedestrians. Pedestrians encounter these robots without any training or prior understanding of the robots’ behaviour, which can cause discomfort, confusion, and delay social acceptance. The study for which I wrote this package evaluated robot communication cues designed for human-robot spatial interactions in public spaces. By communicating robot behaviour to pedestrians, these cues aim to increase the social acceptability of mobile robots. The study used videos of the robot cues and online surveys to collect data from human participants. The study evaluated two different modalities for communicating a robot’s movement to pedestrians: FlashingLights and ProjectedArrows. Previous reviewed literature had not directly compared these two modalities of motion legibility cues. The study also compared using these cues to communicate path information or goal information, which are contributing factors to legible robot motion. Previous reviewed literature had not compared path and goal information for motion legibility cues using visual modalities. Results showed that ProjectedArrows is a more socially acceptable modality than FlashingLights, and that these cues are most socially acceptable when they communicate both path and goal information. The results of this work help guide the development of mobile robots for public spaces.
I prototyped two Cue Types: Projected Arrows and Flashing Lights. The Projected Arrows use a light projector to animate a green arrow on the ground in front of the robot. The Flashing Lights use an orange LED on one side of the robot or the other. Each Cue Type operates in one of three Cue Modes: Path mode, Goal mode, or Path&Goal mode. These Cue Modes communcate information about the robot's path, its goal, or both, respectively. Note that the code uses "traj" (short for trajectory) to refer to the cues operating in path-predictability mode; this README and my thesis use "path" instead of "traj". The image above shows examples of different Cue Types operating in different Cue Modes.
The cues operate using data from the robot's navigation system. In Path mode the robot references a point Pp on its planned path 1 m ahead to communicate its next immediate movement. In Goal mode, the robot references its next two waypoints to communicate its next destination. Distance d and angle θw1 in the diagram below are defined with respect to the robot’s next waypoint. In Goal mode the cues only animate when d < 1.5 m and θw1 < 45°. Path&Goal mode is a sequential combination of both Path mode and Goal mode: the cue operates in Goal mode if d < 1.5 m and θw1 < 45°, otherwise the cue operates in Path mode. I designed Path mode for path-predictability and Goal mode for goal-predictability. When using Flashing Lights in Path mode, the angle θp from the robot to the point Pp determines which light to flash. The robot treats paths with θp < 20° as straight and therefore flashes neither light. In Goal mode, the angle θG between the next two waypoints in the robot’s frame determines which light to flash. When using Projected Arrows in Path mode, a solid arrow is drawn from the robot to point Pp . In Goal mode, a flashing, dashed arrow is drawn at angle θG . The solid arrow was designed to communicate immediately forthcoming motion; the flashing dashed arrow was designed to communicate future motion. The arrows were a fixed length of 30 cm.
In Path mode the Flashing Lights use a higher frequency to represent a sharper angle of the next immediate movement: the lights flash at a frequency of KGθp , where KG is 0.1 Hz/deg. In Goal mode both Cue Types use a higher flashing frequency to represent a closer proximity to the next waypoint: both flash at a frequency of KGd, where KG is 5 Hz/m and d is the distance in metres from the robot to its next waypoint. All flashing frequencies were limited to 0.5-5 Hz to be visible.

The robot’s motion legibility cues: Projected Arrows and Flashing
Lights. The robot uses its planned path to animate cues in Path mode, and
its next two waypoints to animate cues in Goal mode.
The mobile robot I used for this research comprised a PowerBot mobile base and several auxiliary components, which are shown in the schematic below.

Schematic of the auxiliary components added to the mobile base.
1. commbot
- Launched in commbot.launch
- Requires transform from
~frame_ids/worldparam to~frame_ids/robotparam. The maincommbotnode uses data from the robot's navigation system to animate the FlashingLights and ProjectedArrows cues. The diagram below shows the anatomy of thecommbotnode.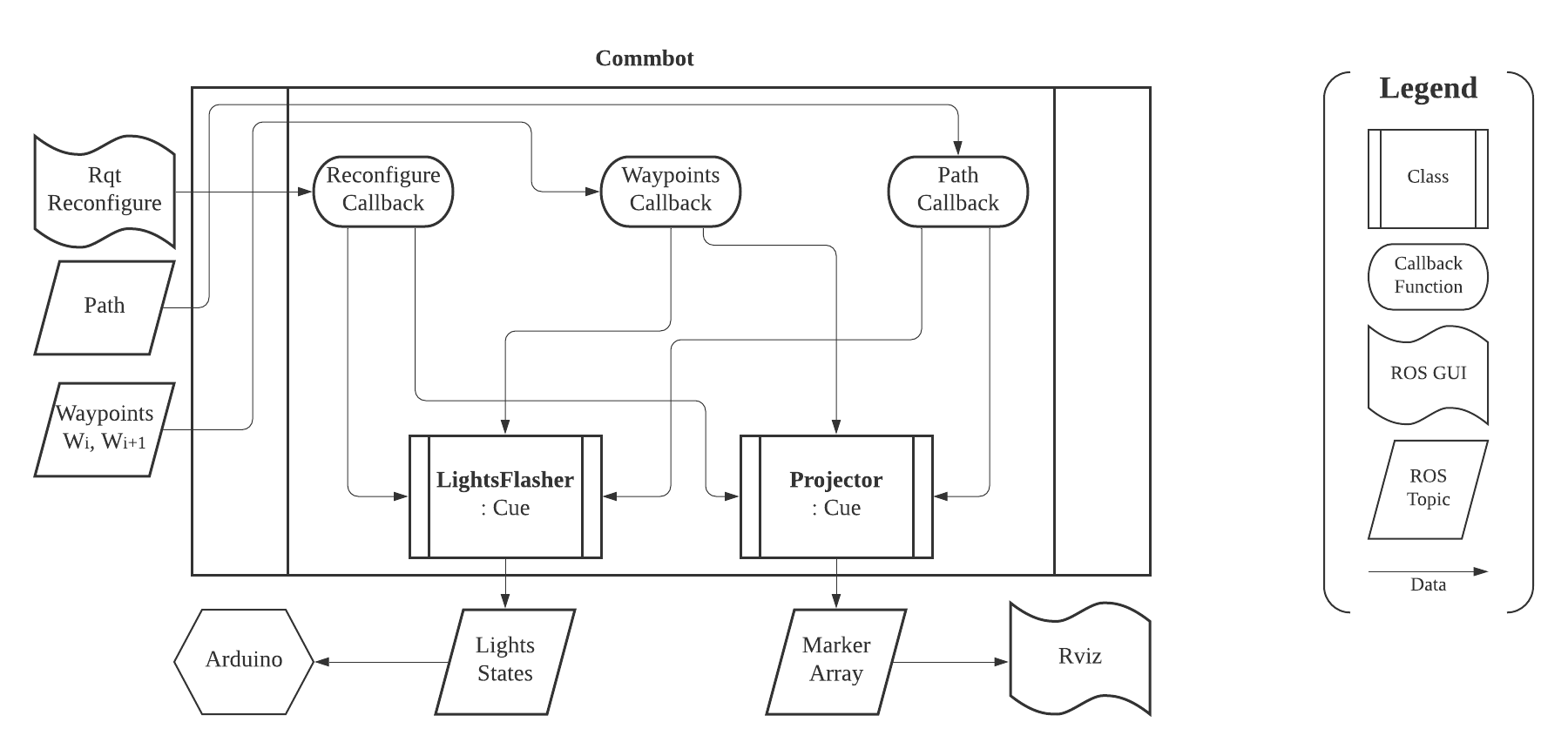
General diagram of thecommbotnode. Thecommbotnode uses a Commbot object. The LightsFlasher and Projector classes are members of the Commbot class. LightsFlasher and Projector inherit from the Cue class. The LightsFlasher object controls the FlashingLights cue type and the Projector object controls the ProjectedArrows cue type. The path input comes from themove_basenode. The waypoints (Wi and Wi+1 ) are described below.

- move_base/TrajectoryPlannerROS/global_plan (nav_msgs/Path)
- The portion of the global plan that the local planner is currently attempting to follow.
- Topic name set by
~topics/pathparam in.
- ~waypoints (geometry_msgs/PoseArray)
- Length 2: {Wi, Wi+1}. Wi is the waypoint to which the robot is currently navigating; Wi+1 is the next waypoint.
- Topic name set by
~topics/waypointsparam.
- ~lights_states (commbot/LightStates)
- On/off states for left and right lights in the FlashingLights cue.
- Topic name set by
~topics/lightsparam.
- ~projection (visualization_msgs/MarkerArray)
- Animation for the ProjectedArrows cue. Designed for display in an Rviz window by a light projector.
- Topic name set by
~topics/projectorparam.
-
All set in the "commbot" namespace using commbot.yaml in commbot.launch.
-
~frame_ids/...
- world (
string, default: "map")- Must match that used in nav. system.
- robot (
string, default: "base_link")- Must match that used in nav. system.
- projection (
string, default: "projection")- Frame ID for projection image on ground in front of robot.
- world (
-
~topics/... :
- path (
string, default: "/move_base/TrajectoryPlannerROS/global_plan")- Topic name for Path subscriber.
- waypoints (
string, default: "waypoints")- Topic name for PoseArray subscriber.
- lights (
string, default: "lights_states")- Topic name for LightStates publisher.
- projector (
string, default: "projection")- Topic name for MarkerArray publisher.
- path (
-
~min_prox_waypoint (
double, default: 1.5)- Min. proximity to robot's current goal within which to activate Goal mode. See d in the diagram above.
-
~markers/...
- goal/... scale and colour attributes for ProjectedArrows cue in Goal mode.
- trajectory/... scale and colour attributes for ProjectedArrows cue in Path mode.
Dynamically Reconfigurable Parameters
- commbot.launch launches
rqt_reconfigurewith Commbot.cfg to set these params. - Main categories are:
- Cue Type and Cue Mode activation.
- The cues will not animate unless these are set.
- "traj" refers to Path mode.
- Setting both Path and Goal mode will activate Path&Goal mode .
- See above to explanations.
- Cue Type and Cue Mode activation.
- See Commbot.cfg for documentation.
- The image below shows the
rqt_reconfigurewindow: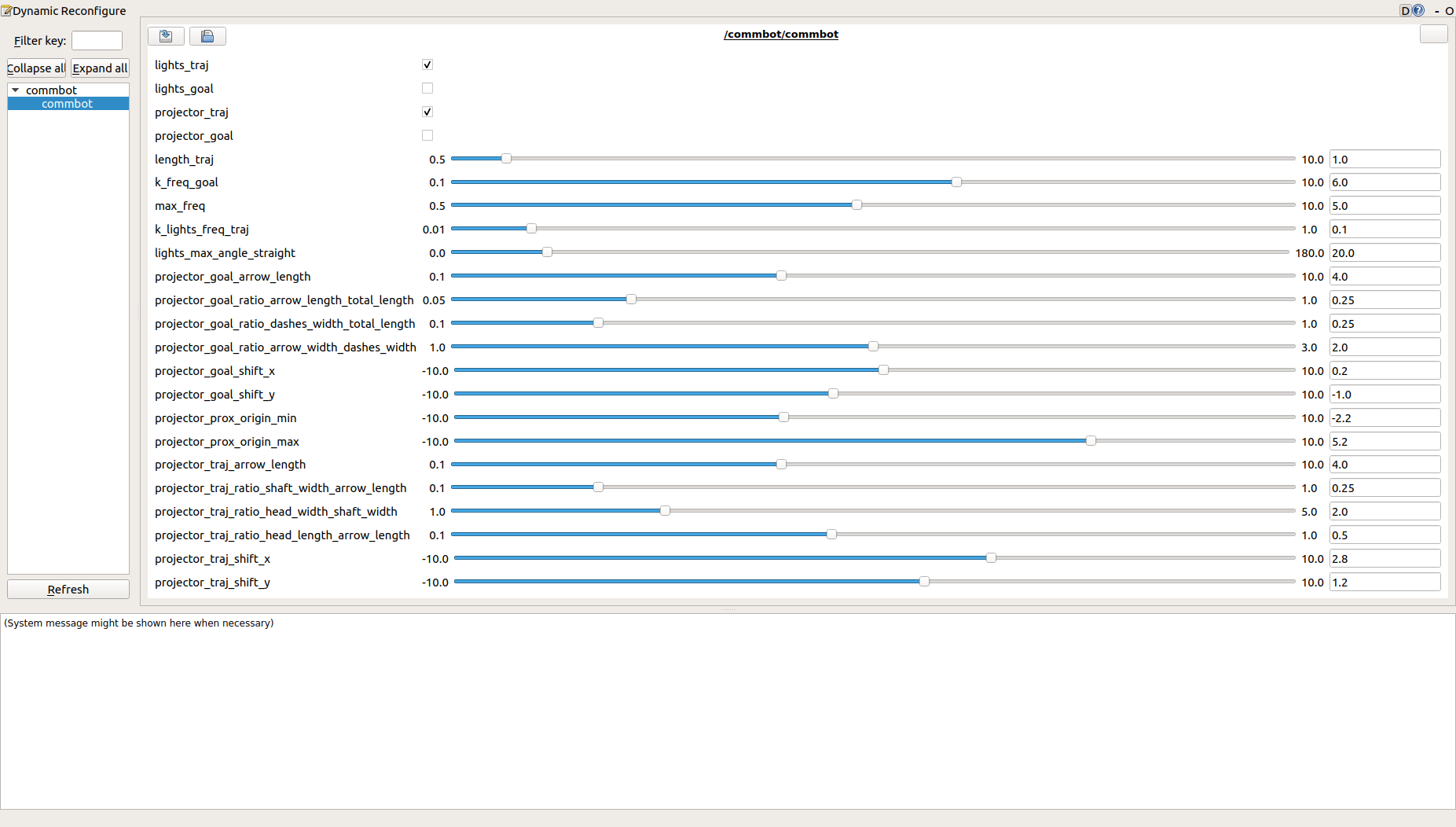

- commbot.cpp
- Defines Commbot class, which has LightsFlasher and Projector members.
cb_rcfg()tunes and enables cues withrqt_reconfigure.cb_path()usesset_cue_traj()in Cue.hpp to set data in LightsFlasher and Projector objects for Path mode.cb_waypoints()usesset_cue_goal()in Cue.hpp to set set data in LightsFlasher and Projector objects for Goal mode.
- Cue.hpp
- Parent of LightsFlasher and Projector
- A timer periodically calls
publish_(), which is overidden in children, to publish the cue data - Data are set with public setters. rqt_reconfigure "enables" the cues. "active" is used in Path&Goal mode to track which to publish
- LightsFlasher.hpp, Projector.hpp
- Children of Cue
- Fields set by Commbot class
- Define
publish_()
- Pulser.hpp
- Timer++ with frequency settings used in LightsFlasher and Projector.
2. supervisor
- Launched in supervisor.launch
- Uses the
move_baseAction API to move the robot between waypoints {W0 , ..., Wn} in the~waypointsparam. - At each waypoint, after sending Wi+1 to
move_base,supervisorholds the robot still for a period specified in the~pauseparam. This pause allows pedestrians to observe the change in the cue before the robot starts moving to its next waypoint.
- ~/waypoints (geometry_msgs/PoseArray)
- {Wi, Wi+1} : Wi is the waypoint to which the robot is currently navigating; Wi+1 is the next waypoint. Vector is length 2.
- Topic name set by
~topics/waypointsparam in.
- ~cmd_vel(geometry_msgs/Twist)
- A stream of velocity commands meant for execution by a mobile base.
- All set in the "commbot" namespace using supervisor.yaml in commbot.launch.
- ~pause (
double, default: 5.0)- Time in seconds for which to halt the robot at each waypoint. See above.
- ~waypoints/...
- Sent to
move_baseas described above. - Manually specified for the Robot Movement Scenarios described in my thesis.
- The "left" scenario moves the robot from start -> junction -> a -> a1.
- The "right" scenario moves the robot from start -> junction -> c -> c1.
- Sent to
- Runs on an Arduino microcontroller to drive two LEDs for the FlashingLights cue.
- Launched in commbot.launch with
is_lights_arduinoarg.
- ~lights_states (commbot/LightStates)
- On/off states for left and right lights in the FlashingLights cue.
- Topic name set by
~topics/lightsparam.
- Publishes a Marker for visualizing the FlashingLights cue in Rviz.
- Launched in commbot.launch with
is_viz_lightsarg.
- ~lights_states (commbot/LightStates)
- On/off states for left and right lights in the FlashingLights cue.
- Topic name set by
~topics/lightsparam.
- ~marker_lights(visualization_msgs/Marker)
- Two orange spheres animated by the LightStates.
L1. commbot.launch
- Launches the
commbotnode. - Launches a tf/static_transform_publisher for a robot -> projection image tf.
- Launches
rqt_reconfigurewith Commbot.cfg to setcommbotnode params. - Optional args:
- is_debug (
bool, default: False)- Launch
commbotnode with gdb. - Note this package must be built with appropriate flags for this to work.
- Launch
- is_lights_arduino (
bool, default: False)- Launch
rosserial_python/serial_nodeto connect with Arduino running lights_flaher.ino.
- Launch
- is_bag (
bool, default: False) - is_viz_lights (
bool, default: False)- Launches
lights_visualizer.
- Launches
- is_debug (
- Launches the
supervisornode. - Requred args:
- goal_id (
string)- ID of final waypoint.
- Must match one of the waypoints in supervisor.yaml - either 'a' or 'c'.
- goal_id (
- Optional args:
- is_debug (
bool, default: False)- Launch
supervisornode with gdb. - Note this package must be built with appropriate flags for this to work.
- Launch
- is_debug (
- Launches Rviz with projector.rviz to display the ProjectedArrows cue.
- This Rviz window is intended to be displayed through a light projector mounted on the robot.
- Also visualizes FlashingLights (requires
is_viz_lightsarg in commbot.launch).
- First, build and source this package in your ROS workspace.
- This package is designed to communicate the behaviour of a robot running the ROS Navigation Stack or equivalent nav. system, set up equivalently to the hardware schematic shown above.
- To run the
commbotnode:roslaunch commbot commbot.launch.commbotcan be run alone, if another system replacessupervisor.commbotcan also be run with the ROS Nav. Stack without thesupervisornode, but only the Path mode will work, not the Goal mode.- Activate the cues using the
rqt_reconfigureGUI.
- To run the
supervisornode:roslaunch commbot supervisor.launch goal_id:='a'orgoal_id:='c'.- Requirements for
supervisorto work:- The mobile base must execute geometry_msgs/Twist msgs on
/commbot/cmd_vel. I used a software multiplexer to prioritze /commbot/cmd_vel over /move_base/cmd_vel (both lower priority than a joystick). - The robot must be running
move_basefrom the ROS Nav. Stack.
- The mobile base must execute geometry_msgs/Twist msgs on
- Requirements for
- To run Rviz for the ProjetedArrows cue:
roslaunch commbot rviz_projector.launch - This Rviz window is intended to be displayed through a light projector mounted on the robot.
- One can also run this in a desktop environment for testing.
- Below is the expected Rviz window when both FlashingLights and ProjectedArrows are in Path mode ("traj") and the
is_viz_lightsarg is set in commbot.launch: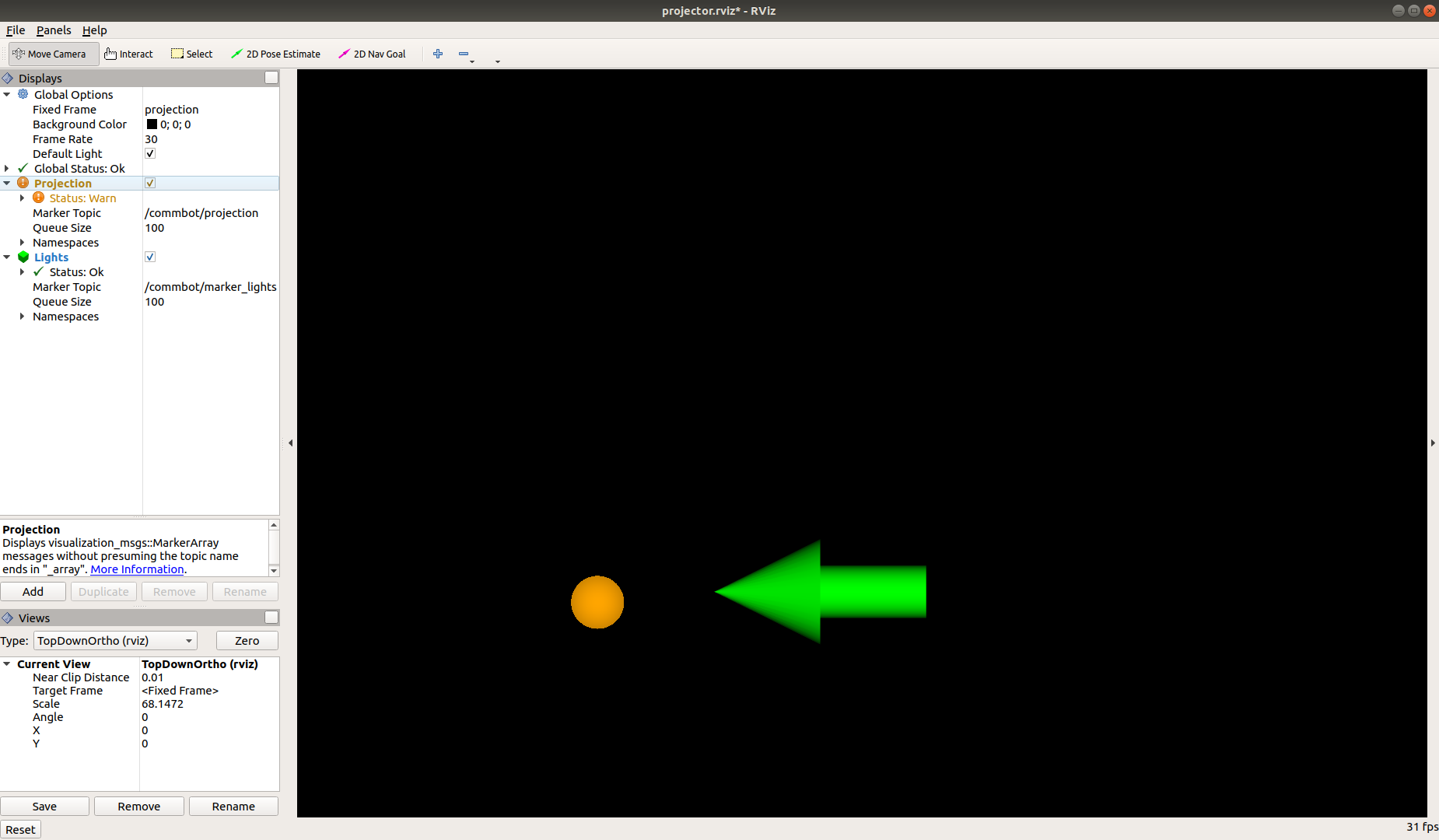 Rviz window for displaying the ProjectedArrows cue. The orange spheres are visualizations of the FlashingLights cue.
Rviz window for displaying the ProjectedArrows cue. The orange spheres are visualizations of the FlashingLights cue. - Expected rosgraph:
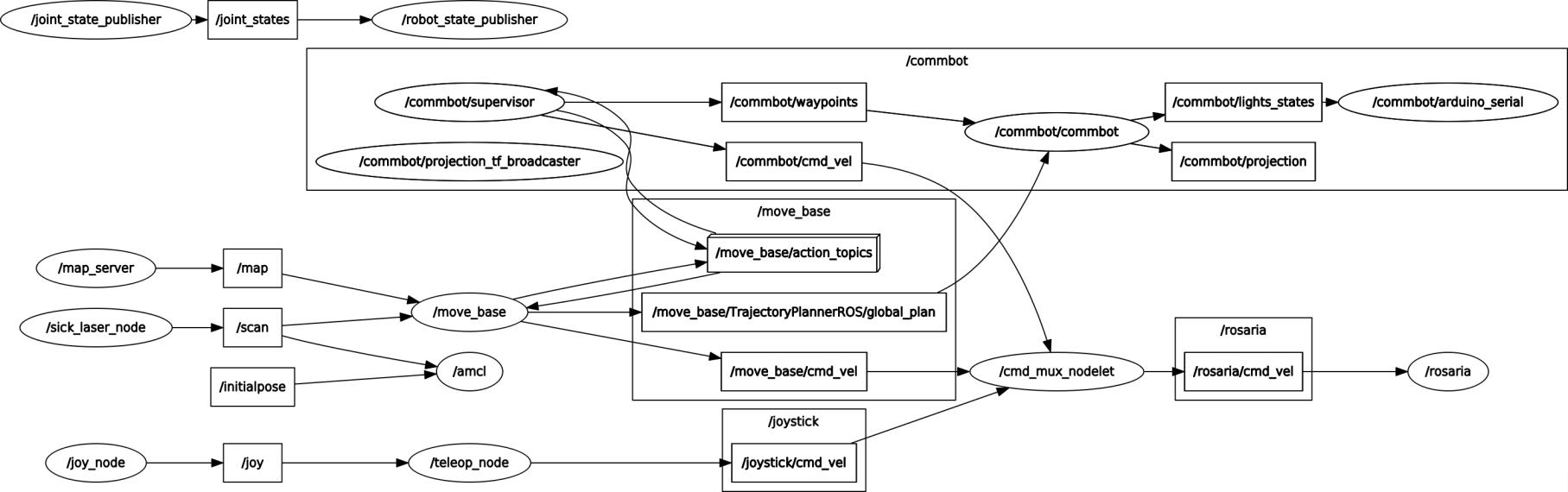 Graph of the ROS network when the motion legibility cues are used with the ROS Navigation Stack and
Graph of the ROS network when the motion legibility cues are used with the ROS Navigation Stack and supervisor. Thearduino_serialnode runs on an Arduino microcontroller to control the FlashingLights cue. All other nodes run on the onboard computer. Rviz is used through a light projector to show/commbot/projectionon the ground in front of the robot.


rosbags for Repeatable Movement
commbotcan also be run with a rosbag for repeatable movement instead of online navigation withmove_baseandsupervisor.roslaunch commbot commbot.launch is_bag:='true' bag:=`rospack find commbot`/bag/a_left.bagor other rosbags in the bag folder.- rosbags are named a/c_left/right.bag. A and C are left and straight movement scenarios; "left" or "right" is the direction of movement around an obstacle in the scenarios described in Chapter 3 of my thesis.
- Below are the required contents of the bags:
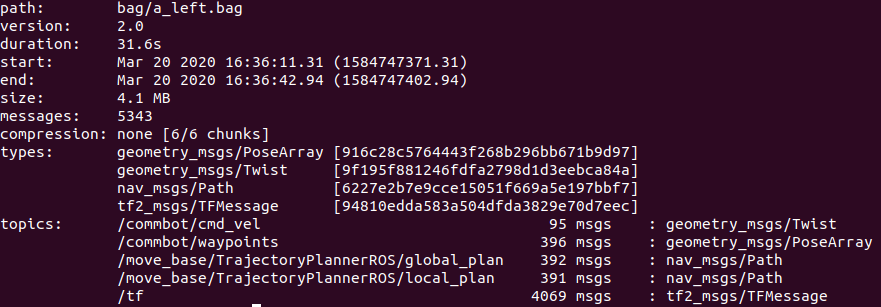
- Required transforms in
/tf:~frame_ids/world(default: "world") ->~frame_ids/robot(default: "base_link")~frame_ids/robot->~frame_ids/projection(default: "projection")
- I recorded each bag when moving the robot with the
supervisornode. I then used this script to convert/rosaria/cmd_velmsgs to/commbot/cmd_velmsgs, so I could still override with the joystick when using a rosbag. - Expected rosgraph:
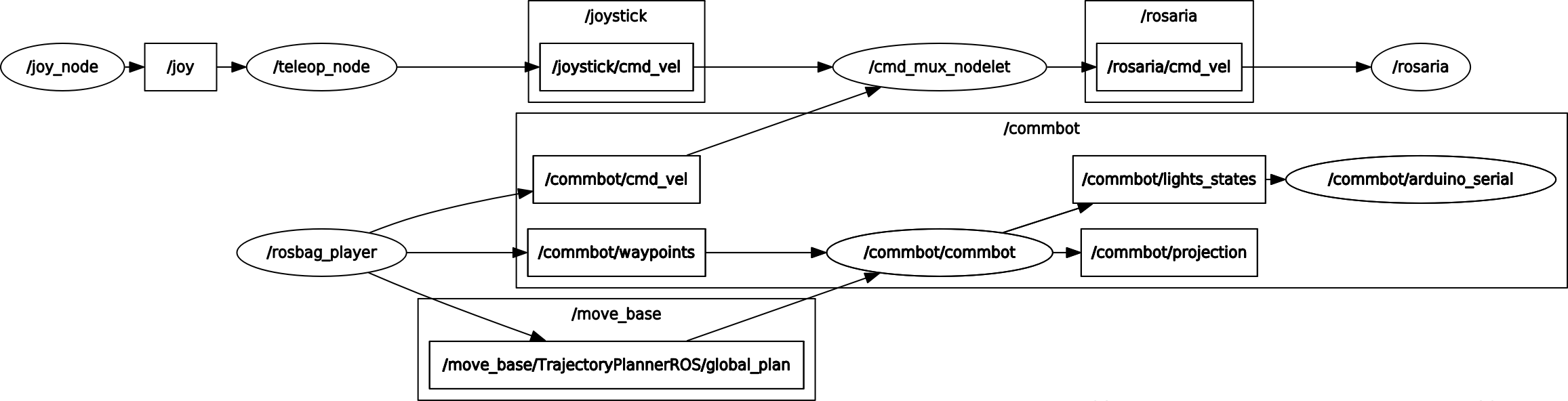 Graph of the ROS network when the motion legibility cues are used with a rosbag.
Graph of the ROS network when the motion legibility cues are used with a rosbag.


That's all, folks! Please feel free to contact me with any questions, concerns, or feedback: nicholas.j.hetherington@gmail.com :)
Please read and abide by the license.