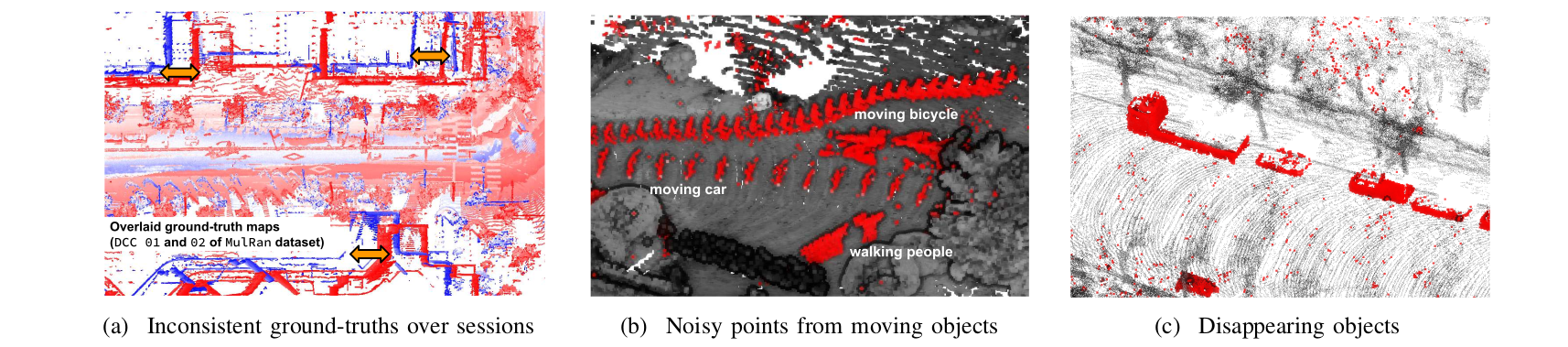
- For LiDAR-based long-term mapping, three challenges exist.

- TBA
- TBA
- TBA
- Using the saver provided with SC-LIO-SAM (also in SC-A-LOAM or FAST_LIO_SLAM), a user should generate the set of sesssion data (i.e., keyframe point cloud scans, keyframe scan context descriptors (SCDs), and an initial pose-graph text file) for each session.
-
command
# change the paths in ltslam/config/params.yaml roslaunch ltslam run.launch
ltremovertdirectory runs removert (for single-session cleaning) and change detection between two sessions.- command
TBA - Outputs

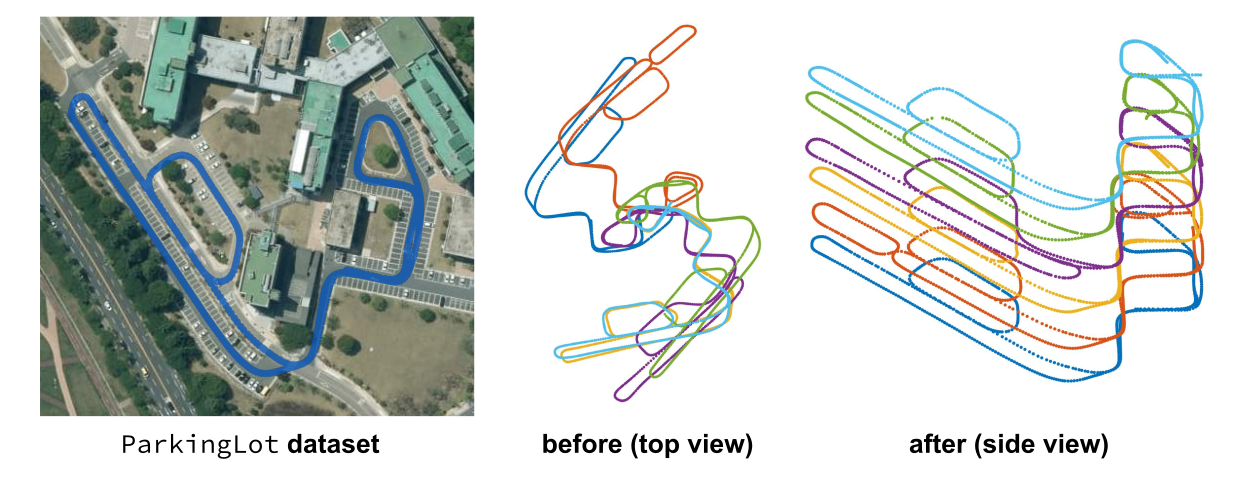
- LT-mapper ParkingLot dataset contains six sequences during three days for the same spatial site, but different initial poses.
- LT-SLAM automatically aligns them in a shared coordinate.
- Dataset Download Link. A sequence is replayable using MulRan File Player.
- For the details of use, see this tutorial video (TBA).

@INPROCEEDINGS { kim2021ltmapper,
AUTHOR = { Giseop Kim, Ayoung Kim },
TITLE = { {LT-mapper: A Modular Framework for LiDAR-based Lifelong Mapping} },
BOOKTITLE = { Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) },
YEAR = { 2022 },
}
- Maintained by Giseop Kim and please contact the author via
giseop.kim@naverlabs.com