Trajectory tracking with a quadrotor.
The non-linear dynamics are linearized about a linearization trajectory
$\bar{x}, \bar{u}$ while the quadrotor aims to track a different reference trajectory
$x_{ref}, u_{ref}$.
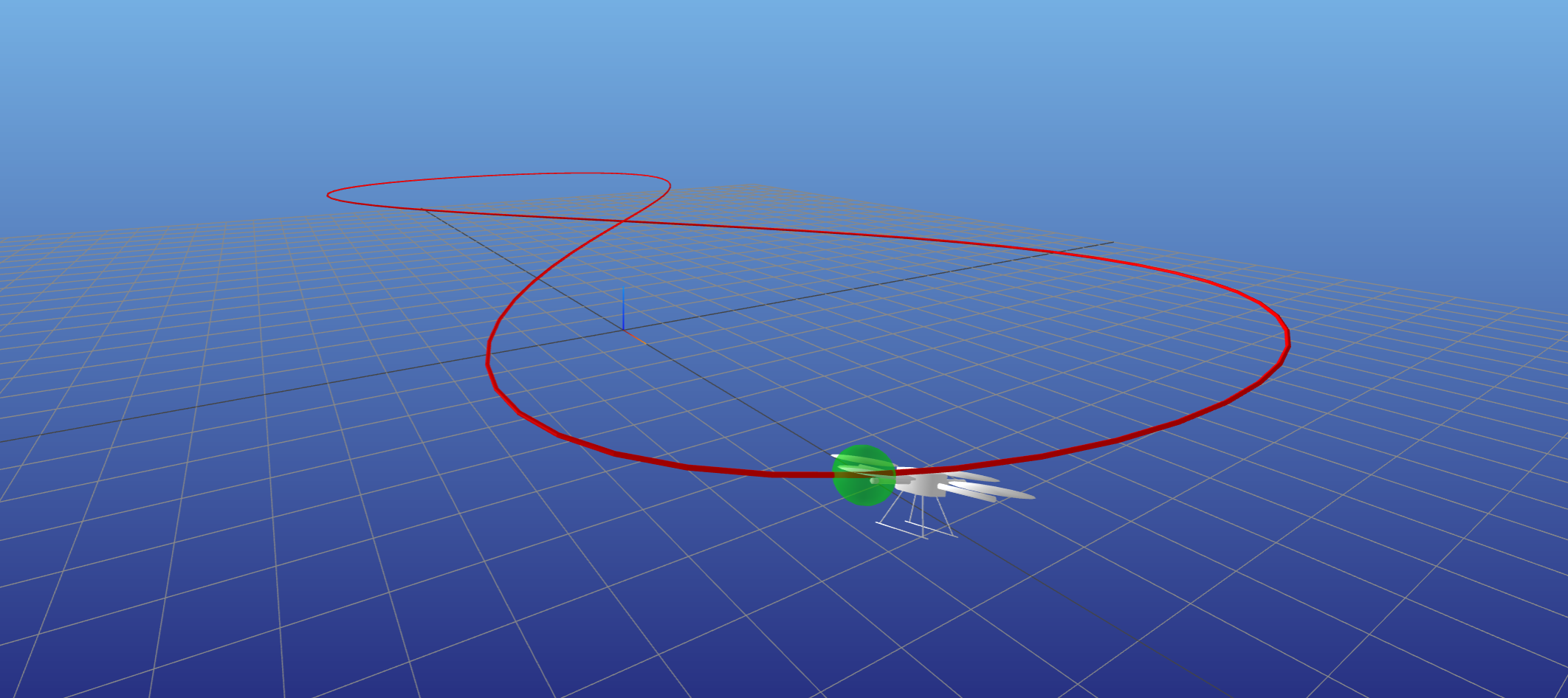
Quadrotor and reference trajectory
The MPC controller solves the following optimization problem :
$$\begin{aligned}
\min_{x_{1:N},u_{1:N-1}} \quad & \sum_{i=1}^{N-1} \bigg[ (x_i - x_{i,ref})^TQ(x_i - x_{i,ref}) + (u_i - u_{i,ref})^TR(u_i - u_{i,ref}) \bigg] + \frac{1}{2} (x_N - x_{N,ref})^TQ_f(x_N - x_{N,ref}) \\\
\textrm{s.t.} \quad
& x_1 = x_{\text{IC}} \\\
& x_{k+1} = f(\bar{x}_k, \bar{u}_k) + \bigg[\frac{\partial f}{\partial x} \bigg|_{\bar{x}_k, \bar{u}_k} \bigg](x_k - \bar{x}_k) + \bigg[\frac{\partial f}{\partial u} \bigg|_{\bar{x}_k, \bar{u}_k} \bigg](u_k - \bar{u}_k) \quad \text{for } i = 1,2,\ldots,N-1 \\\
& u_{min} \leq u_i \leq u_{max} \quad ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ \text{for } i = 1,2,\ldots,N-1 \\\
\end{aligned}$$
Trajectory tracking with MPC controller
The project was created with:
- Python 3.9.0
- numpy 1.24.2
- cvxpy 1.3.1
- matplotlib 3.6.2
- seaborn 0.12.2
- pandas 1.5.3
- jax 0.3.25
To use this project, install it locally via:
git clone https://github.com/elena-ecn/quadrotor_mpc.git
The dependencies can be installed by running:
pip install -r requirements.txt
To execute the code, run:
The contents of this repository are covered under the MIT License.

