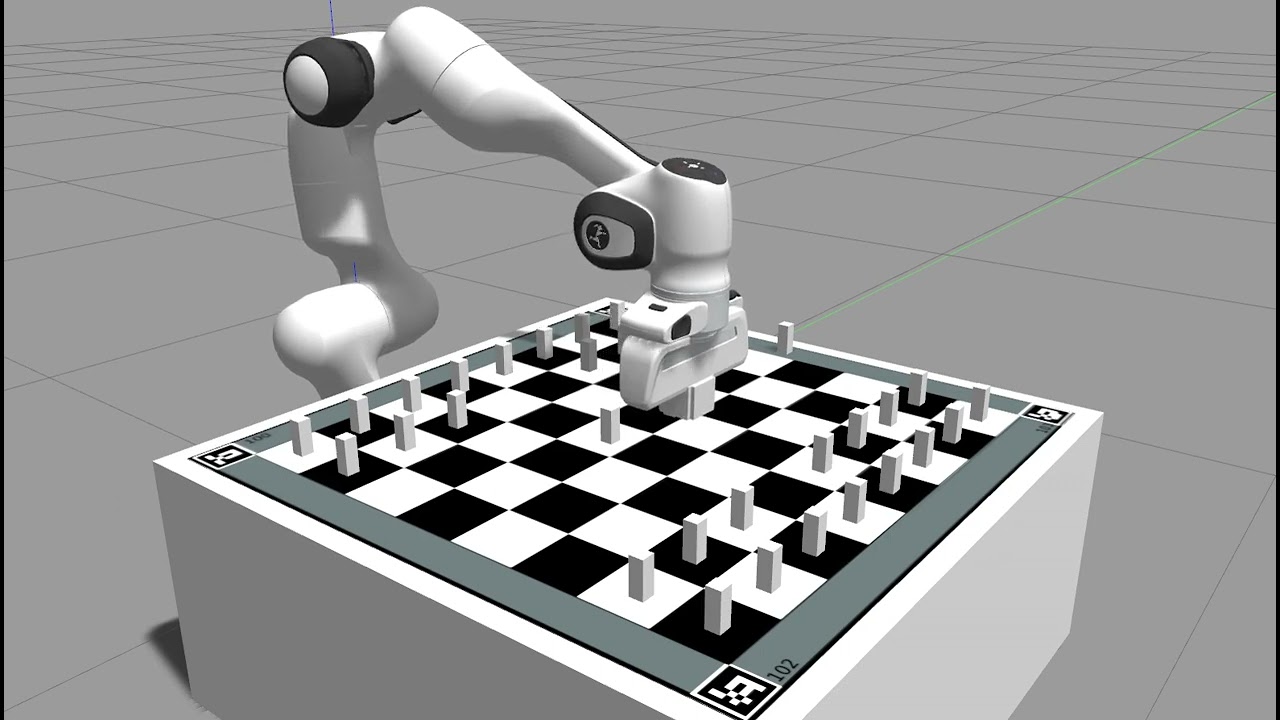
A simulation of a FRANKA EMIKA Panda robotic arm programmed to play chess. Gazebo simulation and ROS2 were used to implement this project.
Clone the repository to your Ros2 workspace, Inside the workspace build the package
colcon build --packages-select chess_manipulator
. install/setup.bash
To launch the simulation:
ros2 launch chess_manipulator simulation.launch.py
To run the example game, In another terminal, from inside the workspace run the following:
. install/setup.bash
ros2 run chess_manipulator example_game