NACHI Project 

- Install ROS
- ROS distribution Indigo
- Create
catkin_ws
cd catkin_ws/src
git clone https://github.com/Nishida-Lab/nachi_project.git # This repository
cd ..
rosdep install -i --from-paths src # install dependent packages
catkin_make
roslaunch nachi_description mz07.launch
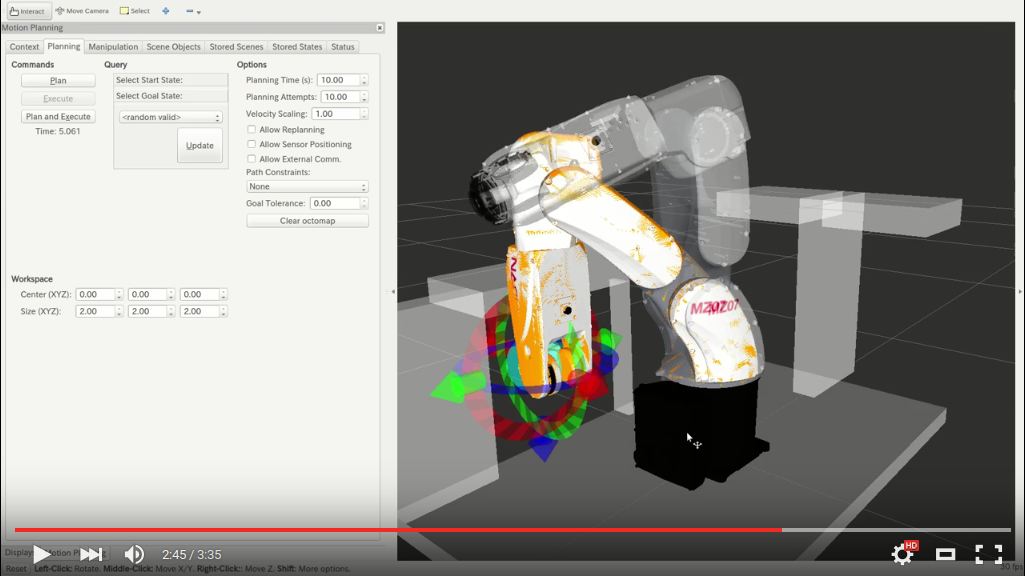
moveitでモーションプランニングできる夢を見る[現在調整中...下のGazebo+Moveitで試してください]
roslaunch nachi_mz07_moveit_config demo.launch
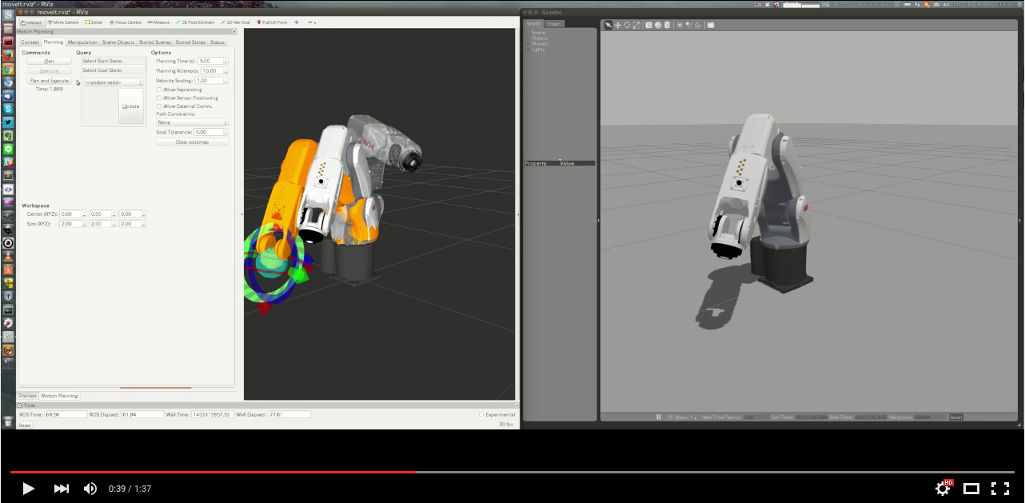
- まだROSで実機が動くかどうかわからないチャレンジリポジトリ!実機が動かない代わりにgazeboでそれっぽく動かす
roslaunch nachi_gazebo mz07_empty_world.launch
roslaunch nachi_mz07_moveit_config moveit_planning_execution.launch
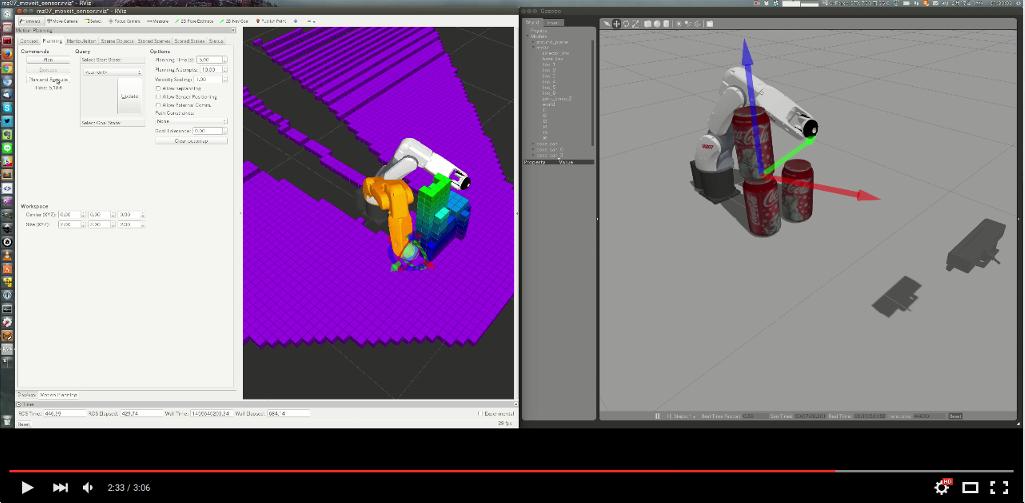
- Kinectを使って障害物を検知したあとモーションプランニング
roslaunch nachi_gazebo mz07_sensor_world.launch
roslaunch nachi_sensor_moveit mz07_sensor_moveit_planning_execution.launch