The Event Camera Rotation Dataset (ECRot) is a VGA-resolution event camera dataset designed for the development of event-based rotational motion related algorithms. ECRot contains ten real-world sequences recorded with a DVXplorer (640 x 480 pixels) and six synthetic sequences generated with a DAVIS240C camera model (240 x 180 pixels) and a DVS128 model.
We provide all sequences in ROSbag files that contain events using dvs_msgs/EventArray message types, and IMU data using sensor_msgs/Imu message types respectively. The camera calibration files are provided in yaml files.
For real data, rotational motion is generated in two modes: Motorized mount (7 sequences) and Hand-held (3 sequences). The motorized mount rotates the event camera approximately around its vertical axis, while the rotation center slightly deviates from the camera's optical center. In the hand-held sequences, there are also some minor unavoidable translations. To show the advantages of event cameras over standard cameras, these sequences contain challenging illumination conditions (e.g., looking directly at the sun, reflections in the river and windows) as well as dynamic objects (e.g., moving pedestrians, bicycles, cars, leaves and water on the river).
The six synthetic sequences cover indoor, outdoor, daylight, night, human-made and natural scenarios. The size of the input panoramas varies from 2K (playroom), 4K (bicycle), 6K (city and street), to 7K (town and bay) resolution. They were generated using the ESIM simulator. The input panoramas were downloaded from the Internet.
This data is associated to the paper CMax-SLAM: Event-based Rotational-Motion Bundle Adjustment and SLAM System using Contrast Maximization, IEEE T-RO 2024, by Shuang Guo and Guillermo Gallego.
If you use it in your research, please cite it as follows:
@Article{Guo24tro,
author = {Shuang Guo and Guillermo Gallego},
title = {{CMax}-{SLAM}: Event-based Rotational-Motion Bundle Adjustment and {SLAM} System using Contrast Maximization},
journal = {{IEEE} Transactions on Robotics},
year = 2024,
volume = {},
number = {},
pages = {1--20}
}| Sequence | Camera model | Duration [s] | File size |
|---|---|---|---|
| Playroom | DVS128 | 2.5 | 47.8 MB |
| Bicycle | DAVIS240C | 5.0 | 264.3 MB |
| City | DAVIS240C | 5.0 | 1.0 GB |
| Street | DAVIS240C | 5.0 | 699.1 MB |
| Town | DAVIS240C | 5.0 | 743.6 MB |
| Bay | DAVIS240C | 5.0 | 827.7 MB |
| Sequence | Setup | Duration [s] | Rotation range [deg] | File size |
|---|---|---|---|---|
| Brandenburg Gate | Motorized mount | 8.0 | 360 | 1.40 GB |
| Charlottenburg Palace | Motorized mount | 8.4 | 360 | 1.18 GB |
| Victory Column | Motorized mount | 10.0 | 90 | 62.2 MB |
| TU Berlin Main Building | Motorized mount | 8.5 | 360 | 1.41 GB |
| TU Berlin MAR Building | Motorized mount | 4.0 |
|
421 MB |
| Square Center | Motorized mount | 8.8 | 360 | 1.37 GB |
| Square Side | Motorized mount | 8.0 | 360 | 1.46 GB |
| Crossroad | Hand-held | 10.2 | 360 | 792 MB |
| River | Hand-held | 5.5 | random | 862 MB |
| Bridge | Hand-held | 7.5 | random | 1.08 GB |
-
Synthetic data:
-
Real-world data:
Synthetic scenes (from the Internet)
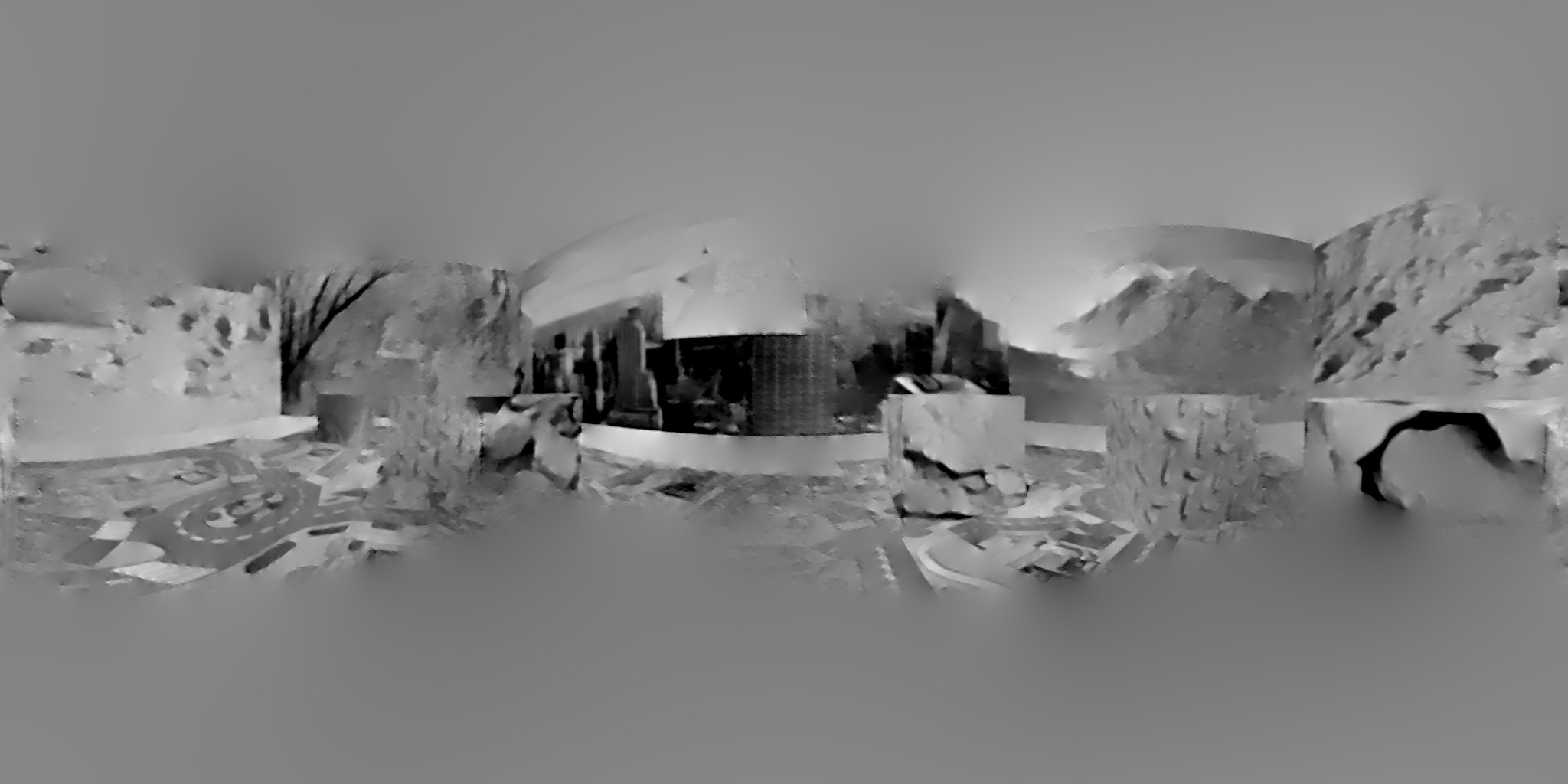
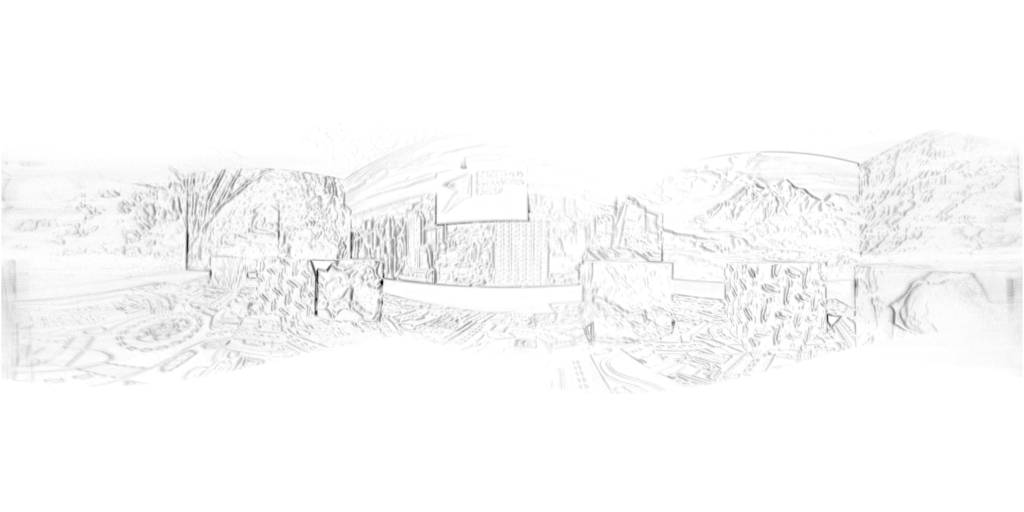
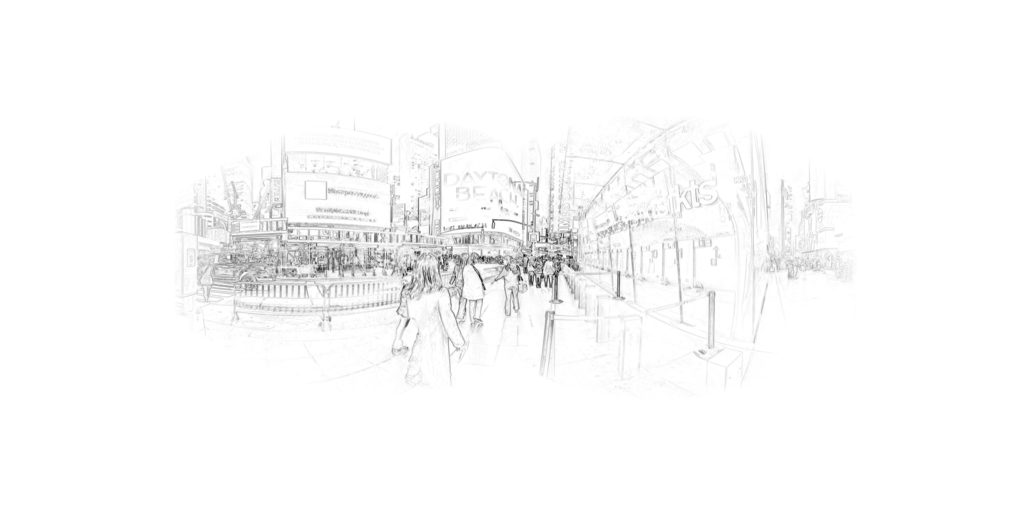
The panoramas used to generate synthetic sequences and the panoramic Images of Warped Events (IWEs) produced by CMax-SLAM are presented as below.
-
Playroom (from this repository at RPG-UZH)
-
Bicycle


-
City


-
Street

-
Town


-
Bay














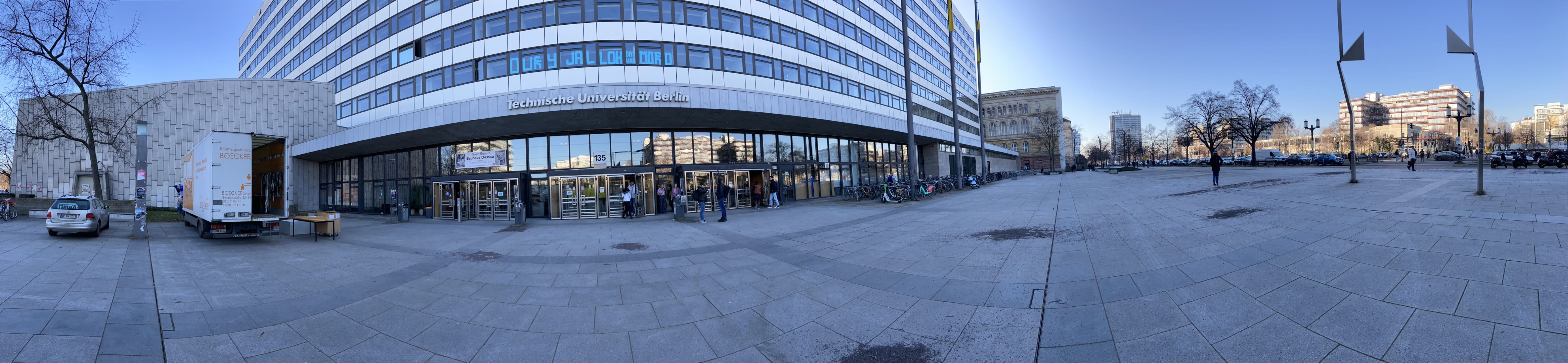
The panoramas captured by an iPhone 11 and the panoramic Images of Warped Events (IWEs) produced by CMax-SLAM are presented as below.
-
TU Berlin Main Building
-
TU Berlin MAR Building


-
Square Center

-
Square Side


-
Crossroad


-
River


-
Bridge






















Ms. Nan Cai (for assistance on the motorized sequences) and Mr. Yunfan Yang (for assistance with the hand-held sequences).