Granular Rigid Body Simulation Framework: efficient research tools to simulate non-smooth granular rigid body dynamics.

|
|
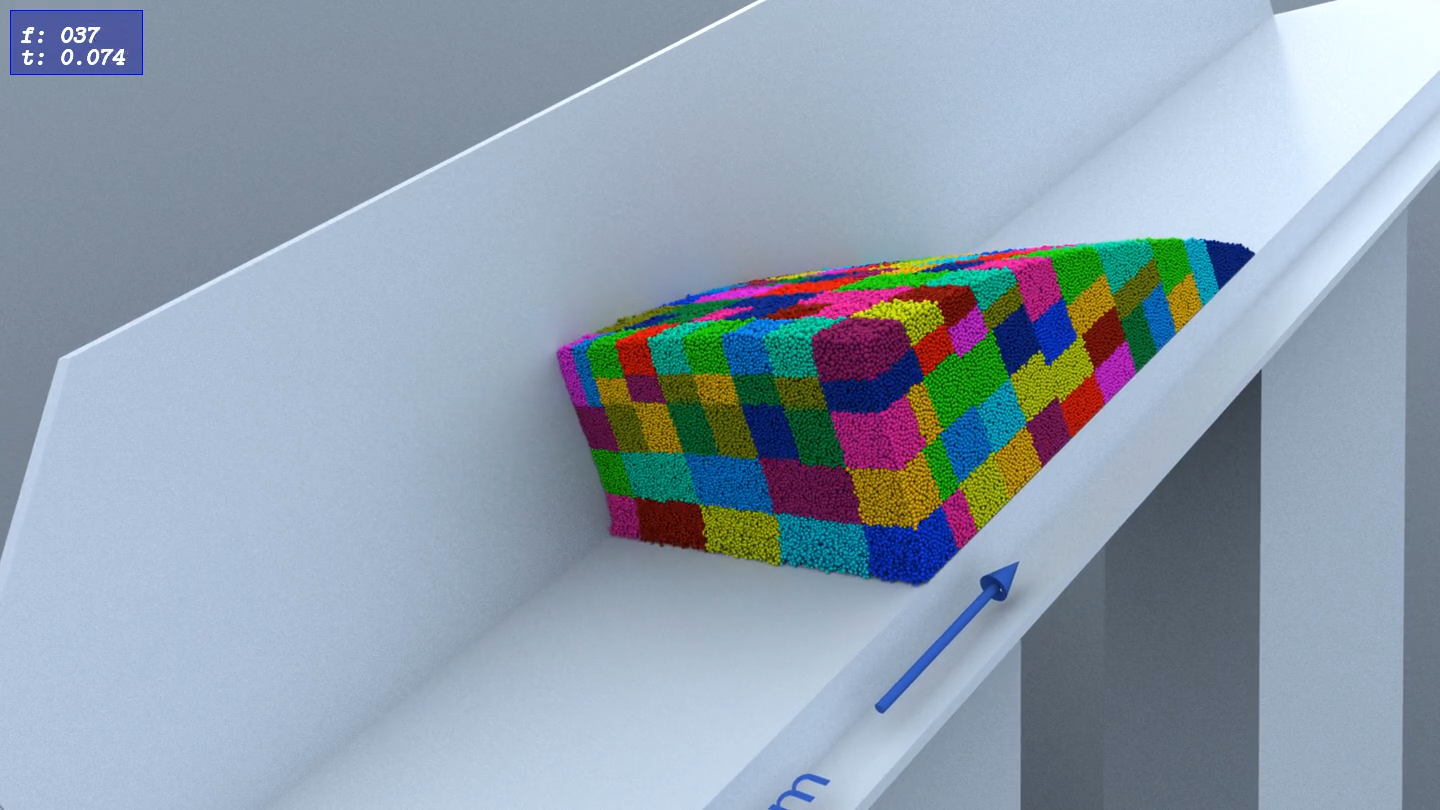 Coloring: Process Domain
Coloring: Process Domain
|
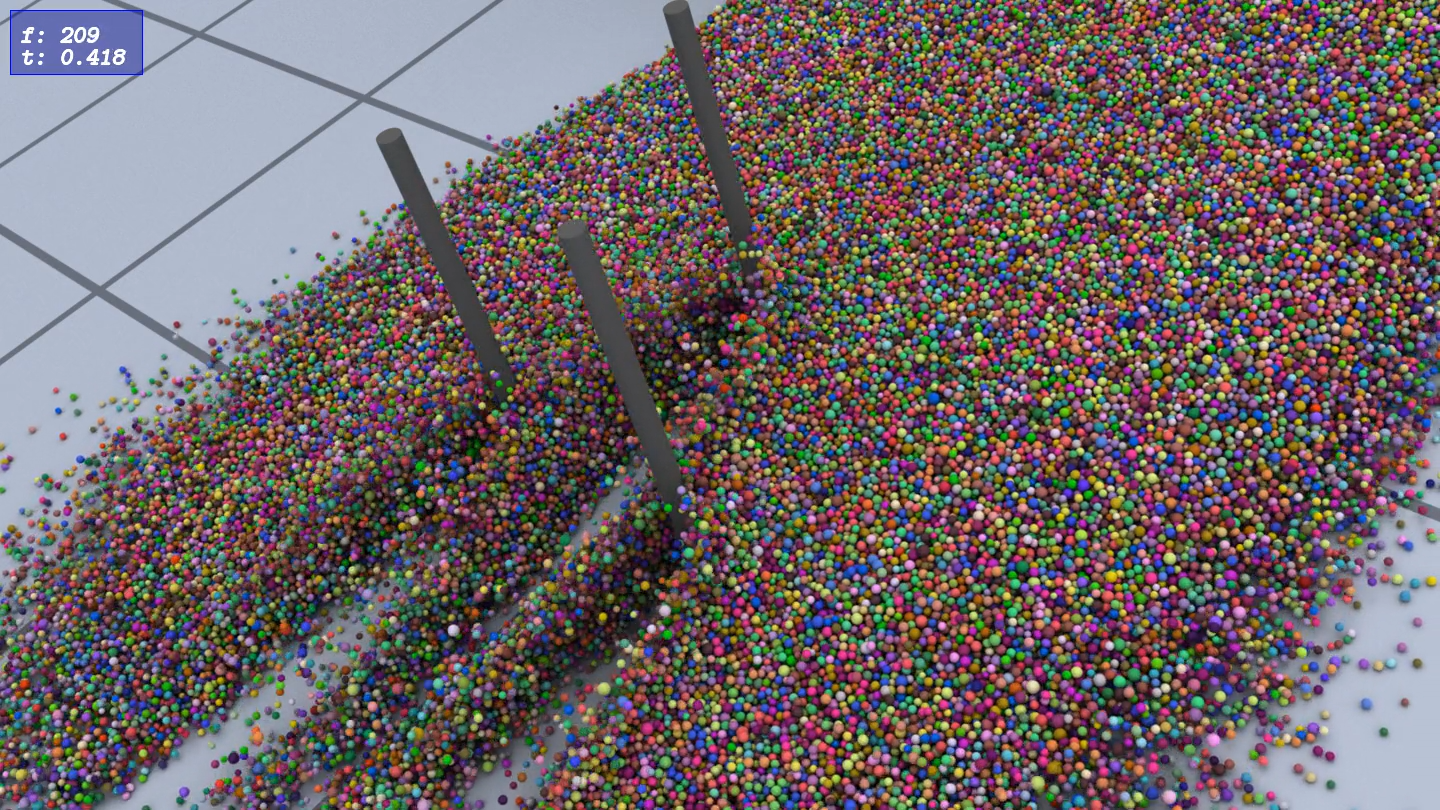 Coloring: Random
Coloring: Random
|
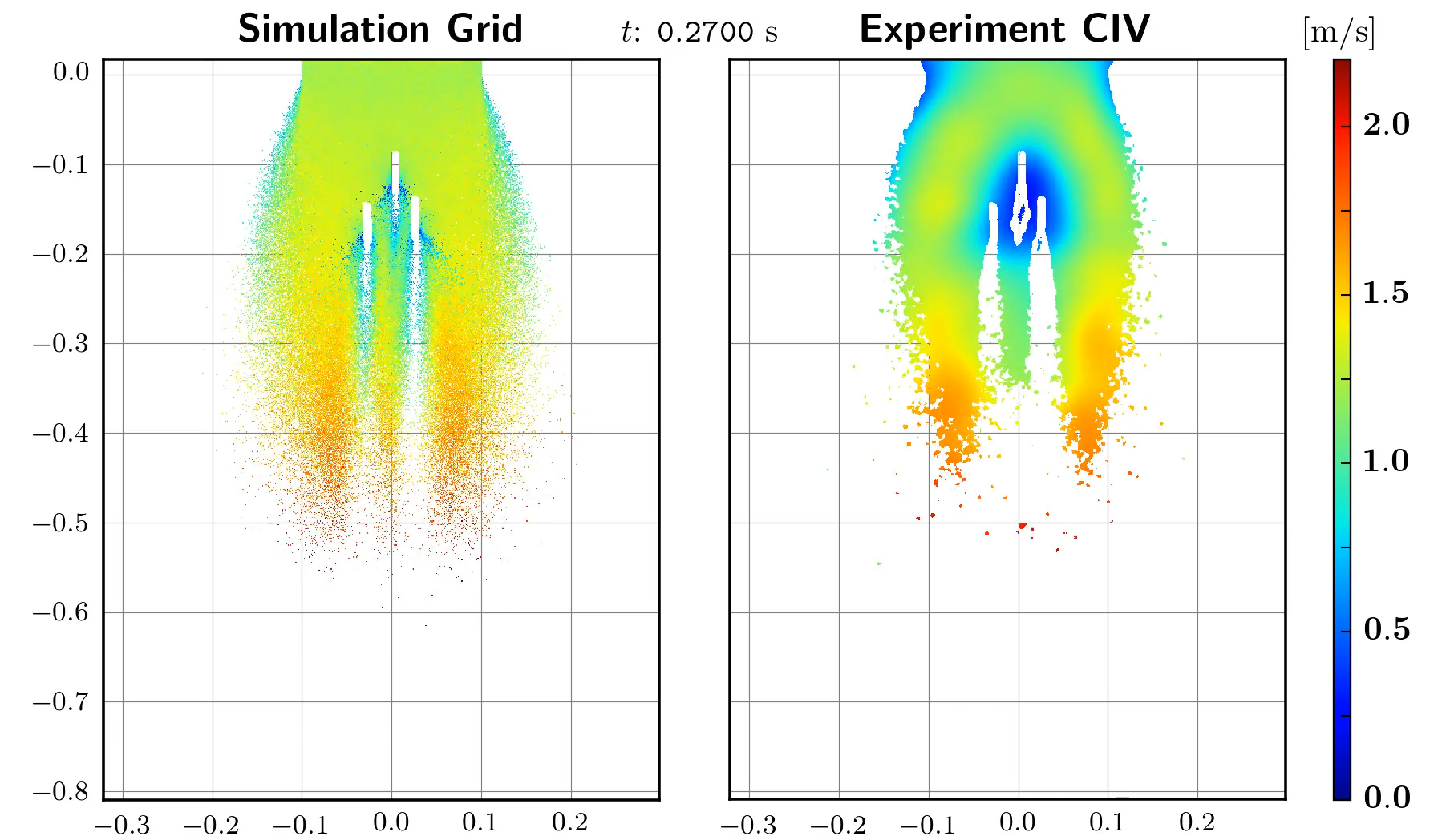 Coloring: Velocity
Coloring: Velocity
|
Chute flow simulation & experiment with 1 million spheres:
- method: Moreau time-stepping with unilateral contacts and Coulomb friction
- computed on 384 cores with
GRSFSimMPIin 12 h, rendered withGRSFConverterandprmanin 24 h. - time step: 0.0002 s, friction coefficient: 0.8
- restitution coefficient: 0.0 (fully inelastic impacts)
- global contact iterations: 1000