Run roslaunch thermal_object_tracking thermal_object_track.launch
Video demo:
- FLIR Lepton 2.5 Thermal Camera
- PureThermal 2 - FLIR Lepton Smart I/O Board
- PureThermal 2 Case
- 3D printed Camera Mount
- Intel Realsense D435
ROS-noeticrealsense2_rospackages you can install them herepyrealsense2OpenCV2-Python
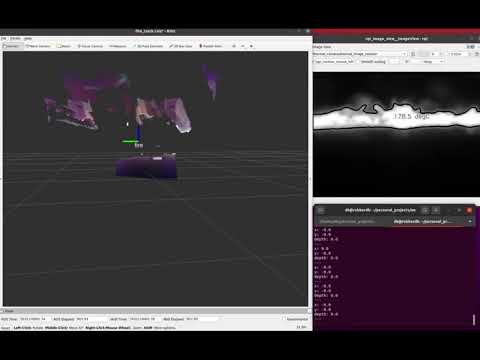
This is a ROS package publishes tf called fire of a heating element using a thermal camera and a depth camera. Getting the pixel coordinate of the heat source from the thermal imaging, the depth value of the corrspoing pixel from the deph image is calculated. Then the pixel from the depth image is converted into a point. Knowing the transformations from fire to camera_link and camera_link to world frame, we can calculate the x, y, and z coordinates of the fire relative to the world frame
This method does not work unless thermal camera and depth camera are located and aligned properly.
You can take a look at the ROS topic combined_image to see how well they are aligned.
This node takes care of detecting a highest spot in the camera view and reading its temperature from the thermal camera. Using USB video class (UVC), it captures thermal imaging data and reads the temperature from the radiometry in the gray scale. This node was implemented based on PureThermal UVC Capture Examples
Subscriber:
- none
Publisher:
- /object_y (std_msgs/Float32): y-coordinate of the heat source in 2D thermal image
- /object_x (std_msgs/Float32): x-coordinate of the heat source in 2D thermal image
- /highest_T_detected (std_msgs/Float32): the highest tempertaure detected
- /thermal_image (sensor_msgs/Image): radiometric image
This package combines the radiometric image and camera/aligned_depth_to_color/image_raw topic which realsense2_ros publishes.
Subscriber:
- /camera/aligned_depth_to_color/image_raw (sensor_msgs/Image): aligned depth to color image from
realsense - /camera/color/image_raw (sensor_msgs/Image): RGB color image from
realsense
Publsuher:
- /object_y (std_msgs/Float32): y-coordinate of the heat source in 2D thermal image
- /object_x (std_msgs/Float32): x-coordinate of the heat source in 2D thermal image
- /highest_T_detected (std_msgs/Float32): the highest tempertaure detected
- /thermal_camera/thermal_image_bgr (sensor_msgs/Image): radiometric image in BGR format
- /thermal_camera/thermal_image_contour (sensor_msgs/Image): radiometric image with contour of heat source
- /combined_image (sensor_msgs/Image): combined image of radiometic image and aligned depth to color image
- /combined_image2 (sensor_msgs/Image): combined image of radiometic image and RGB color image
- /stacked_image (sensor_msgs/Image): horizontally stacked image of radiometic image and aligned depth to color image
This node reads the aligned depth to color image, gets depth value from the tageted pixel, and converts the pixel to a point
Subscriber:
- /object_y (std_msgs/Float32): y-coordinate of the heat source in 2D thermal image
- /object_x (std_msgs/Float32): x-coordinate of the heat source in 2D thermal image
- /camera/aligned_depth_to_color/image_raw (sensor_msgs/Image): aligned depth to color image from
realsense - /camera/aligned_depth_to_color/camera_info (sensor_msgs/CameraInfo): camera info of
realsense's aligned depth to color image
Publisher:
- /point_coord (thermal_object_tracking.msg/point_coord): x, y, and depth data from the point converted from the the pixel
This node publishes tf of the heat source (fire) and calculates the x, y, and z coordinates of the camera_link and fire relative to the world frame
Subscriber:
- /point_coord (thermal_object_tracking.msg/point_coord): x, y, and depth data from the point converted from the the pixel
Publisher:
- /camera_position (thermal_object_tracking.msg/xyz): xyz-coordinate of the
camera_linkfrom theworldframe - /fire_position (thermal_object_tracking.msg/xyz): xyz-coordinate of the
firefrom theworldframe