- This is the original work on livox-camera extrinsic calibration. The corresponding paper is " Feiyi. Chen, Liang. Li, Shuyang. Zhang, Jin. Wu and Lujia. Wang, "PBACalib: Targetless Extrinsic Calibration for High-Resolution LiDAR-Camera System Based on Plane-Constrained Bundle Adjustment," in IEEE Robotics and Automation Letters, 2022.". You can visit our website to find more details and the supplementary
- This work is implemented by Matlab.

├─matlab The code to perform calibration
│ ├─colmap Related tools to process the data exported from colamp
│ ├─LM_solver
│ │ ├─jocbian
│ │ └─obj
│ └─utils
├─ros_ws The related cpp code to collect the data for the calibration
└─shell Shell scripts to perform SFM, which will call the exec files in colmap
-
Calibration Scene
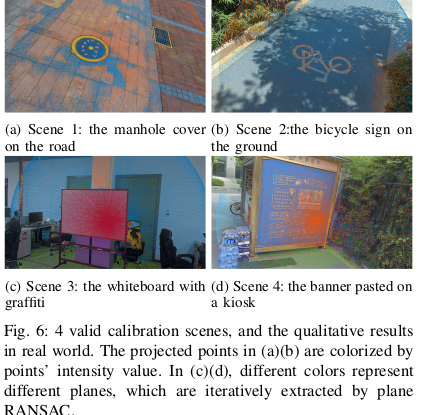
- First find a calibration scene, which is a plane with arbitrary texture. The calibration accuracy performs better when 1) texture is rich 2) the plane is strictly flat 3) the background is clean.
- The example scenes are shown as follows
-
Collection tools
- We supply tools to collect images and point could. For our sensors operate in ROS framework, we write c++ tools to subscribe ROS topic and save data.
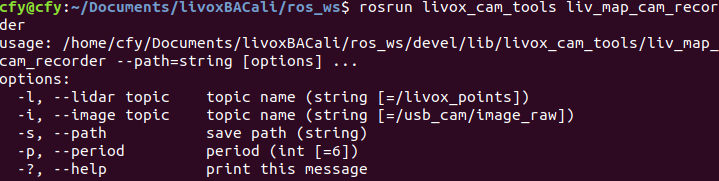
- The tool is in folder ros_ws, which is a ros workspace. Run following command to build and execuate the tool
It will print help notes to tell you what parameters you need to specify, as follows
catkin_make rosrun livox_cam_tools liv_map_cam_recorder
-
Undistorted images Run matlab file undist_imgs.m to undistort all images. Please change the intrinsic, distortion matrix and data file path.
-
Default data structure
data/img/1.png (raw images) data/img/2.png (raw images) ... ---------------------------- data/img_un/1.png (undistorted images) data/img_un/2.png (undistorted images) ... ---------------------------- data/pcd/1.pcd (raw pcds) data/pcd/2.pcd (raw pcds)


We use colmap to conduct SfM and export model files as txt into folder "models". Then the default data structure is shown as follows
data/img/1.png (raw images)
data/img/2.png (raw images)
...
--------------------------
data/img_un/1.png (undistorted images)
data/img_un/2.png (undistorted images)
...
--------------------------
data/pcd/1.pcd (raw pcds)
data/pcd/2.pcd (raw pcds)
...
--------------------------
models/cameras.txt
models/images.txt
models/points3D.txt
models/project.ini
Please read readme files in colmap to learn how to conduct SfM
Run "main_cali_real.m" file in matlab folder to calibrate the extrinsics between camera and dense LiDAR. Please modify the parameters in "main_cali_real.m", which contains
K = [897.4566,0,635.4040;
0,896.7992,375.3149;
0,0,1];
D = [-0.4398 0.2329 -0.0011 2.0984e-04 -0.0730];
TInit = [0.0324 -0.9994 0.0130 -0.0152
0.0215 -0.0123 -0.9997 0.0695
0.9992 0.0327 0.0211 -0.0132
0 0 0 1.0000];
data_path = "/home/cfy/Documents/livoxBACali/data/real/scene2/";
pcd_folder = data_path+"pcd";
img_folder = data_path+"img_un";
The extrinsics and projection result will show automatically when finished.
-
simulation environment: based on gazebo, we published on this repo
-
the collected real and simulation data is placed on the google drive
If you use this project for your research, please cite:
@ARTICLE{chen2022pbacalib,
author={Chen, Feiyi and Li, Liang and Zhang, Shuyang and Wu, Jin and Wang, Lujia},
journal={IEEE Robotics and Automation Letters},
title={PBACalib: Targetless Extrinsic Calibration for High-Resolution LiDAR-Camera System Based on Plane-Constrained Bundle Adjustment},
year={2023},
volume={8},
number={1},
pages={304-311},
doi={10.1109/LRA.2022.3226026}}
- Please feel free to report issue