A collection of ROS services and publishers wrapping the CoppeliaSim APIs. These services and publishers use the .msgs and .srvs files defined in the coppeliasim_msgs_srvs package. This package enables ROS to control the simulation inside CoppeliaSim (e.g. start/stop the simulation, loading/unloading scenes/modules, ... etc), and it allows CoppeliaSim to publish important information about the simulation (e.g. clock, simulation_state, time_step, simulation_time) on ROS topics.
- coppeliasim_msgs_srvs: contains the header files of the msgs/srvs used in this package.
The following instructions assume that a Catkin workspace has been created at $HOME/catkin_ws and a CoppeliaSim directory is located in the directory $HOME/CoppeliaSim. You always can update the paths based on your machine setup.
# change to the src directory in your Catkin workspace
cd $HOME/catkin_ws/src
# Clone coppeliasim_msgs_srvs pkg
git clone https://github.com/tud-cor/coppeliasim_ros_services
# change to the main Catkin workspace
cd ..
# build the workspace (using catkin_tools)
catkin build
# After building, you can check if the plugin 'libsimExtRosServices.so' was successfuly created by listing the content of the devel/lib
ls devel/lib | grep
libsimExtRosServices.soThe generated plugin should be loaded while starting CoppeliaSim, this can be done by copying the file libsimExtRosServices.so to the main directory of CoppeliaSim (ie: $HOME/CoppeliaSim):
# Copy the generated plugin to CoppeliaSim directory
cp $HOME/catkin_ws/devel/lib/libsimExtRosServices.so $HOME/CoppeliaSim/
In a new terminal start a ROS master before you start CoppelliaSim:
roscore
In another terminal run CoppeliaSim:
# change to CoppeliaSim dir
cd $HOME/CoppeliaSim
# run CoppeliaSim
./coppeliaSim.sh
or you can launch coppeliaSim using the coppeliasim_run package:
rosrun coppeliasim_run start_coppeliasim
In the same terminal running CoppeliaSim, you can see the following message indicating a successful load of the RosServices plugin:
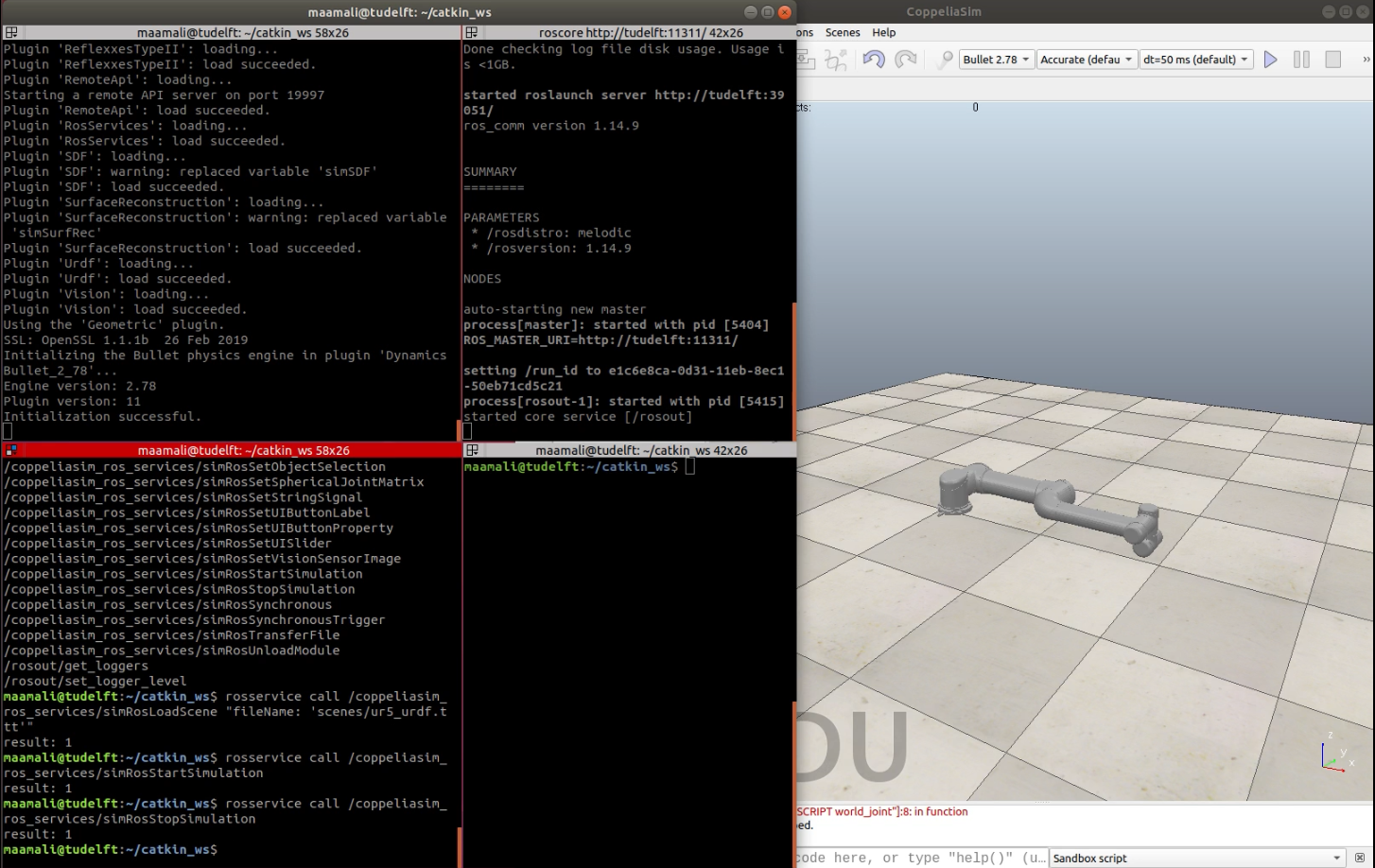
Plugin 'RosServices': loading...
Plugin 'RosServices': load succeeded.
In a new terminal, you can check all the available services and topics offered and published by the plugin:
- services: all services offered by the plugin will have
/coppeliasim_ros_services/as a prefix
rosservice list
- topics: the two main topics published by the plugin are
/clockand/info
rostopic list
The plugin publishes to two topics (/clock and /info), and offers many services. Here is an example of how you can use some of these services:
- starting the simulation
# service_request is empty, service_response is an integer indicating successful operation
rosservice call /coppeliasim_ros_services/simRosStartSimulation
- Loading a module: loading the coppeliasim_ros_control module (file:
libsimExtRosControl.so, name:RosControl)
# service_request should conatins a path to module_file and module_name, service_response is an integer represents the pluginHandle
rosservice call /coppeliasim_ros_services/simRosLoadModule " fileName: 'libsimExtRosControl.so' pluginName: 'roscontrol' "
For more information about all the services, check the coppeliaSim APIs page.
Refer to the ur5_coppeliasim_roscontrol package to see how you can use the RosServices plugin to control the simulation of a UR5 robot in CoppeliaSim.