Openpose_ros_node_firephinx crashes on running
Harsharma2308 opened this issue · comments

I run-
CUDA_VISIBLE_DEVICES=0 rosrun openpose_ros_pkg openpose_ros_node_firephinx
The node starts as this
OpenPose ROS Node
[ INFO] [1541368733.120120169, 1539892993.522311860]: Initialization Success
As soon as I start publishing images(from a bag file), the node crashes -
Segmentation fault (core dumped)

This is probably related to your OpenCV setup, which I talked about here: #1 (comment)

I couldn't run openpose_ros_node_firephinx neither.
But I have a different error.
$ rosrun openpose_ros_pkg openpose_ros_node_firephinx
OpenPose ROS Node
[ INFO] [1548343474.741492354]: Initialization Success
[ INFO] [1548343474.973164466]: Performing Forward Pass
[ INFO] [1548343475.190324677]: Call Successful
Forward Pass Success
Got Keypoints
Rendering Pose
Outputing Image
(openpose_ros_node_firephinx:13284): Gtk-ERROR **: GTK+ 2.x symbols detected. Using GTK+ 2.x and GTK+ 3 in the same process is not supported
Trace/breakpoint trap (core dumped)
I searched about this error, but I couldn`t understand yet.
If you know about this error, I would be grateful if you give me advice.

I couldn't run openpose_ros_node_firephinx neither.
But I have a different error.$ rosrun openpose_ros_pkg openpose_ros_node_firephinx
OpenPose ROS Node
[ INFO] [1548343474.741492354]: Initialization Success
[ INFO] [1548343474.973164466]: Performing Forward Pass
[ INFO] [1548343475.190324677]: Call Successful
Forward Pass Success
Got Keypoints
Rendering Pose
Outputing Image(openpose_ros_node_firephinx:13284): Gtk-ERROR **: GTK+ 2.x symbols detected. Using GTK+ 2.x and GTK+ 3 in the same process is not supported
Trace/breakpoint trap (core dumped)I searched about this error, but I couldn`t understand yet.
If you know about this error, I would be grateful if you give me advice.
Hello, I also have a question to ask you, which version of ROS are you using? I am running rosrun openpose_ros_pkg openpose_ros_node here and I get the following error.
[rospack] Error: package 'openpose_ros_pkg' not found
Hello.
I am using ROS kinetic.
Hello.
I am using ROS kinetic.
Hello, I am also using ROS kinetic, are you using the https://github.com/stevenjj/openpose_ros.git file directly? Openpose is not updated yet, I am learning this now, but there are many unknown problems. Is it convenient to upload your project to github? Thank you.
Yes, I am using his file directory.
And the directory I am using is exactly the same as him.
Have you installed old version of openpose? When I was using recent openpose, openpose_ros couldn't work well.
And I uploaded openpose_ros which I am using in my repository.
Yes, I am using his file directory.
And the directory I am using is exactly the same as him.
Have you installed old version of openpose(https://github.com/CMU-Perceptual-Computing-Lab/openpose.git)? When I was using recent openpose, openpose_ros couldn't work well.
And I uploaded openpose_ros which I am using in my repository.
thanks, I installed old version of openpose(https://github.com/CMU-Perceptual-Computing-Lab/openpose.git),And I was using recent openpose, openpose_ros couldn't work well,Thank you for your project, I will go to your github download and try it out. Thank you.

Is there an attempted to get the 3d extractor to work now?
It can`t work because of the openpose_ros_node_firephinx's error.

It can`t work because of the openpose_ros_node_firephinx's error.
Is there an attempted to get the 3d extractor to work now?
Hello, is the 2D pose estimation good? Have you achieved 2D?
Hello, is the 2D pose estimation good? Have you achieved 2D?
Hello.
Opempose_ros_node_firephinx occured error, so I can't detect 2D pose.
Left terminal: My camera node
Center terminal: openpose_ros_node
Right terminal: openpose_ros_node_firephinx (The last Japanese means "core dump").

你好。
Opempose_ros_node_firephinx发生错误,因此我无法检测到2D姿势。左侧终端:我的摄像机节点
中心终端:openpose_ros_node
右侧终端:openpose_ros_node_firephinx(最后一个日语表示“核心转储”)。

What is the configuration of the project you are running, and is the project downloaded? Have you modified it?
Sorry for the lack of information.
I did
$ roslaunch realsense2_camera rs_rgbd.launch
$ rosrun openpose_ros_pkg openpose_ros_node
$ rosrun openpose_ros_pkg openpose_ros_node_firephinx
I downloaded
・openpose , caffe , Pose model(https://github.com/CMU-Perceptual-Computing-Lab/openpose.git)
・openpose_ros(https://github.com/stevenjj/openpose_ros.git)
And I modified openpose_ros_node_firephinx.cpp、openpose_skeleton_extract.launch、skeleton_extract_3d_node.cpp、skeleton_extract_3d_visualization_node.cpp, camera resolution to 1280*720.
My environment:
OS : Ubuntu16.04 LTS
GPU : NVIDIA GeForce GTX 1080
CUDA8.0
cuDNN5.1
OpenCV3.2
Camera : RealSense D435
Am I properly answered your question? I'm not good at English.
@makino-ryota : From your error output, it looks like openpose is working but the OpenCV visualization is not. I suggest commenting these two lines out
cv::imshow("OpenPose ROS", outputImage);
cv::waitKey(1);
from
@zhengyuezhi: That link does not go to the old version that my github page specifies. The old version is specifically this commit hash: https://github.com/CMU-Perceptual-Computing-Lab/openpose/tree/a1e0a5f4136e702b5731a268c2993fb75ca4753c
@SilentLancer If the 2D version works for you, then the 3d version just uses PCL processing, so the 3D skeleton extraction should work.
@stevenjj is it possible to use a webcam to gather the PCL or that is only possible through a depth camera?
@makino-ryota : It's weird to me why you both run openpose_ros_node and openpose_ros_node_firephinx.
You don't really need openpose_ros_node_firephinx.
Can you instead try running these commands?
roslaunch realsense2_camera rs_rgbd.launch
rosrun openpose_ros_pkg openpose_ros_node
rosrun openpose_ros_pkg test_openpose_ros_service_call
Then open up Rviz and subscribe to the camera image /openpose_ros/detected_poses_image after running test_openpose_ros_service_call
@SilentLancer : If you have two webcams, you can get a stereo point cloud with http://wiki.ros.org/stereo_image_proc
@stevenjj Thank you for helping me.
①I commented out these two lines, openpose_ros_node_firephinx works well! Thank you.
cv::imshow("OpenPose ROS", outputImage);
cv::waitKey(1);
②openpose_ros_node_firephinx is not necessary to display openpose as you say. Thanks.
Then it looks run well in the terminal,but camera's error happen.(surrounded by red rectangle)
Which file should I modify?
And I have another question. openpose_ros_node always detect 4 people.(Upper right terminal)
Is this normal?

@makino-ryota Great. In Rviz, try using an Image topic instead of a Camera.
You should see something similar to this:
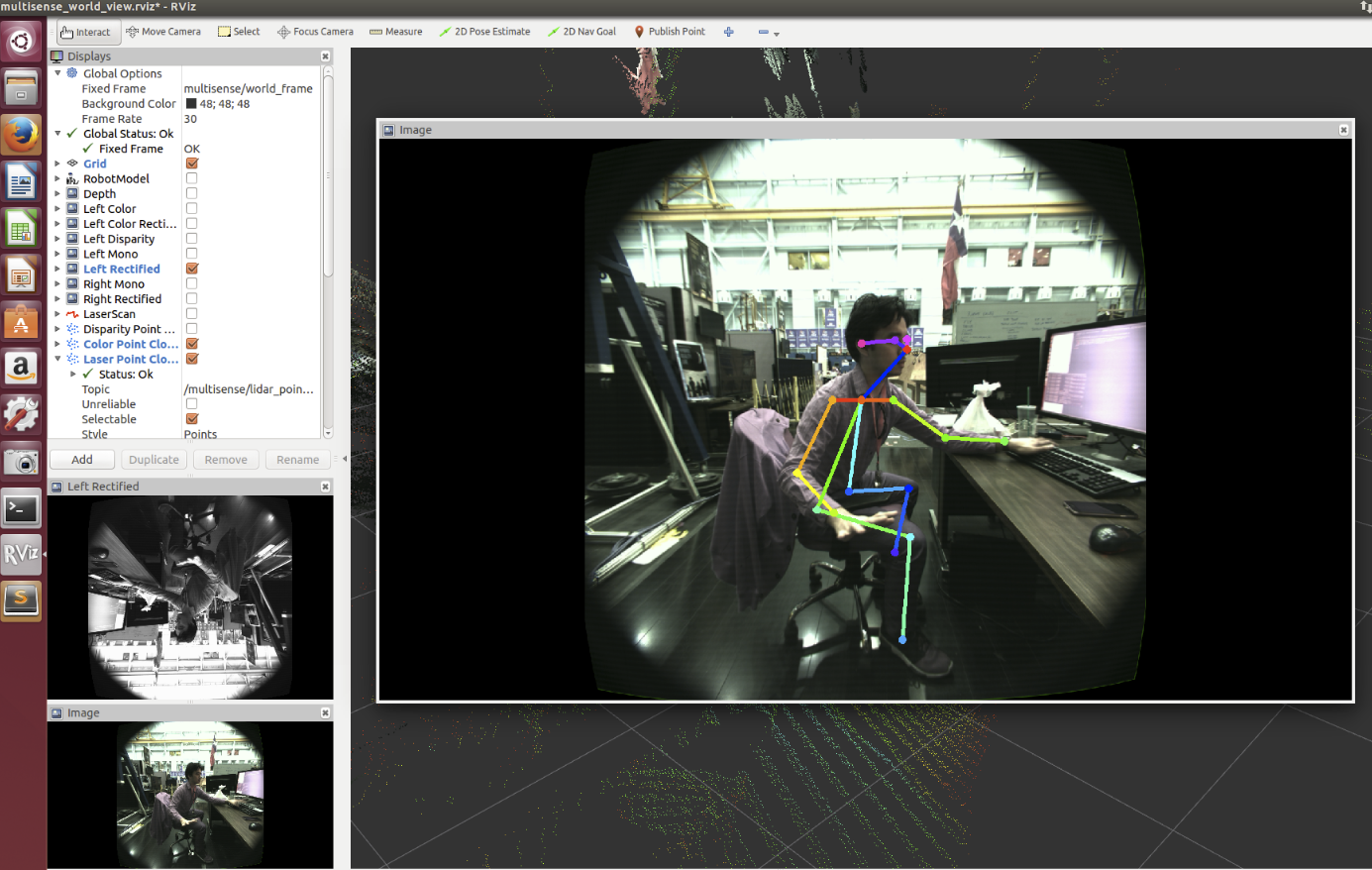
Previously, I saw that your setup detected 1 person. The performance of Openpose is environment sensitive. I would try to make sure to visualize what the detections are first.
@stevenjj I changed to the image topic, there is no error in Rviz.
And I understand why openpose_ros_node detect 4 people... It detected from this sample image.It was a simple oversight.
openpose_ros_firephinx was able to detect me. Thank you so much!!
Then I tried to run skelton_extract_3d, It occurs error.
I want you ask about this issues in another page #8. I'd really appreciate it if you could give me your opinion.
