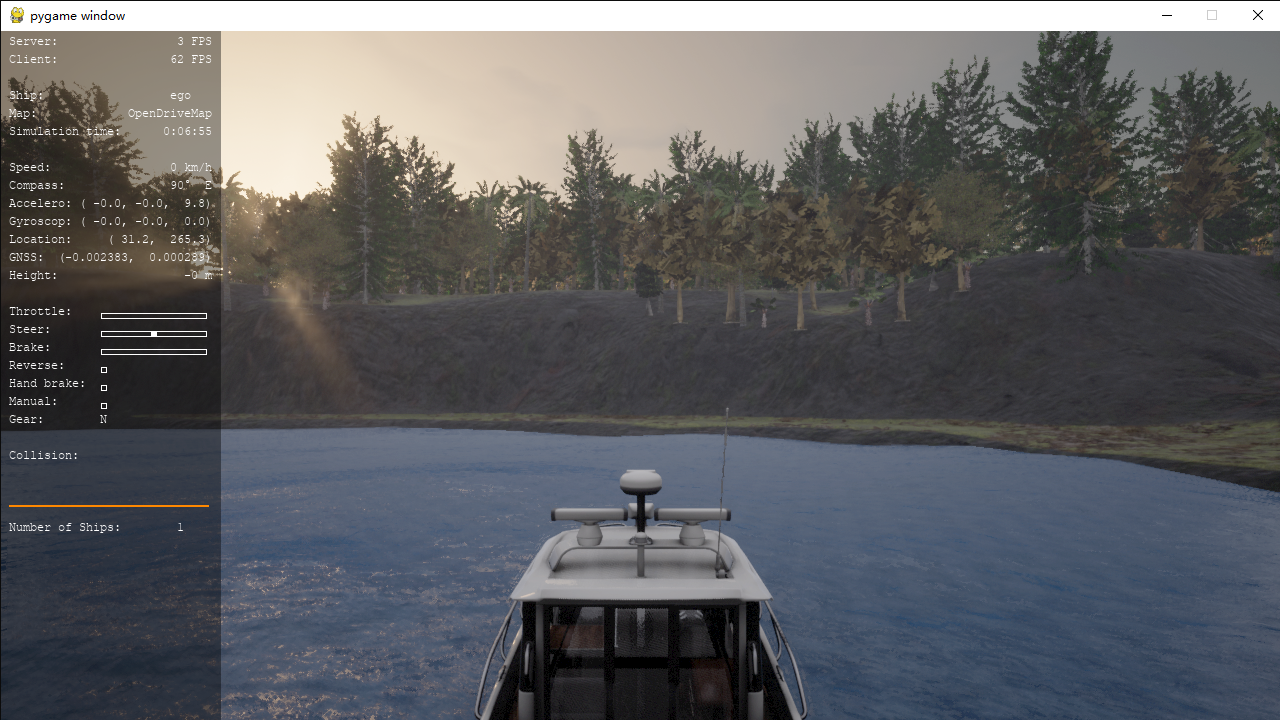
Unmanned Surface Vehicle simulation system for the development of driverless system on USV. This simulator uses Unreal 4 to build a test environment for Unmanned Surface Vehicles (USV).
Buoyancy











ToDoList
- Simulation of the marine environment 🚀 (>20km*20km) Done
- weather simulation 🚀 Done
- GPS simulation 🚀 Done
- IMU simulation 🚀 Done
- Perception sensor simulation (camera) 🚀 Done
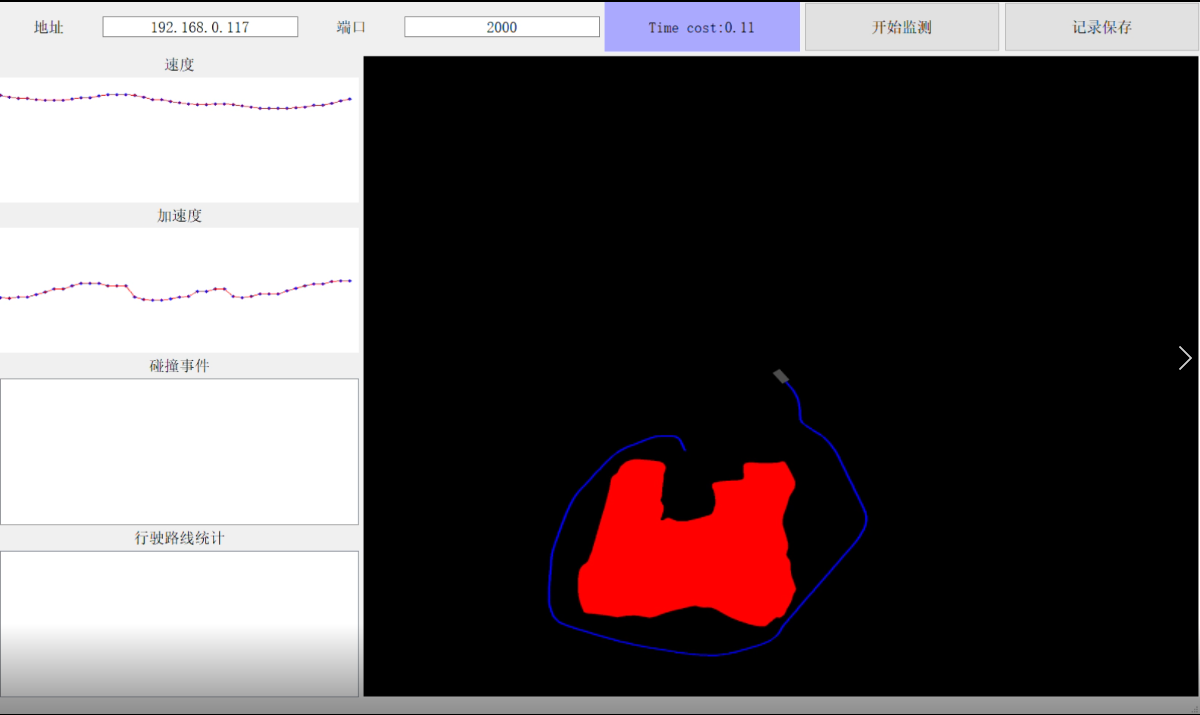
- map drawing 🚀 Done
- Perception sensor simulation (lidar, marine radar) 🚀 Done
- Back-end data monitoring, recording and analysis module 🚀 Done
- Mission scene construction 🚀 To be done