

Path tracing example contributed by https://github.com/daseyb
NanoRT is simple single header only ray tracing kernel.
- Portable C++
- Only use C++-03 features by default.
- C++11 feature(threads) is also available
- There is experimental C89 port of NanoRT in
c89branch https://github.com/lighttransport/nanort/tree/c89
- BVH spatial data structure for efficient ray intersection finding.
- Should be able to handle ~10M triangles scene efficiently with moderate memory consumption
- Custom geometry & intersection
- Built-in triangle mesh gemetry & intersector is provided.
- Cross platform
- MacOSX, Linux, Windows, iOS, Android, ARM, x86, SPARC, (maybe) MIPS, (will be) RISC-V, etc.
- For example, NanoRT works finely on Raspberry Pi 2 (arm 32bit) and Raspberrry Pi 3!(AARCH64 kernel)
- GPU efficient data structure
- Built BVH tree from
NanoRTis a linear array and does not have pointers, thus it is suited for GPU raytracing (GPU ray traversal).
- Built BVH tree from
- OpenMP multithreaded BVH build.
- Robust intersection calculation.
- Robust BVH Ray Traversal (using up to 4 ulp version): http://jcgt.org/published/0002/02/02/
- Watertight Ray/Triangle Intesection: http://jcgt.org/published/0002/01/05/
- Double precision support
- Beneficial for HPC and scientific visualization.
- Test renderer for your light transport algorithm development.
- Test renderer for your shader language development.
- Collision detection (ray casting).
- BVH builder for GPU/Accelerator ray traversal.
- Add 2D/3D rendering feature for non-GPU system.
- ImGui backend? https://github.com/syoyo/imgui/tree/nanort
- Nano SVG backend? https://github.com/syoyo/nanovg-nanort
- lightmetrica https://github.com/hi2p-perim/lightmetrica-v2
- OSPRay NanoRT module https://github.com/jeffamstutz/module_nanort/
- Your project here!
- bvh: C++17 BVH Construction and Traversal Library https://github.com/madmann91/bvh
- BlazeRT: double precision ray tracer for scientific or engineering applications https://github.com/cstatz/blazert
nanort::Ray represents ray. The origin org, the direction dir (not necessarily normalized), the minimum hit distance min_t(usually 0.0) and the maximum hit distance max_t (usually too far, e.g. 1.0e+30) must be filled before shooting ray.
nanort::BVHAccel builds BVH data structure from geometry, and provides the function to find intersection point for a given ray.
nanort::BVHBuildOptions specifies parameters for BVH build. Usually default parameters should work well.
nanort::BVHTraceOptions specifies ray traverse/intersection options.
template<typename T>
class {
T org[3]; // [in] must set
T dir[3]; // [in] must set
T min_t; // [in] must set
T max_t; // [in] must set
unsigned int type; // optional. ray type.
} Ray;
class BVHTraceOptions {
// Trace rays only in face ids range. faceIdsRange[0] < faceIdsRange[1]
// default: 0 to 0x3FFFFFFF(2G faces)
unsigned int prim_ids_range[2];
bool cull_back_face; // default: false
};
nanort::BVHBuildOptions<float> build_options; // BVH build option(optional)
const float *vertices = ...;
const unsigned int *faces = ...;
// Need to specify stride bytes for `vertices`.
// When vertex is stored XYZXYZXYZ... in float type, stride become 12(= sizeof(float) * 3).
nanort::TriangleMesh<float> triangle_mesh(vertices, faces, /* stride */sizeof(float) * 3);
nanort::TriangleSAHPred<float> triangle_pred(vertices, faces, /* stride */sizeof(float) * 3);
nanort::BVHAccel<float> accel;
ret = accel.Build(mesh.num_faces, triangle_mesh, triangle_pred, build_options);
nanort::TriangleIntersector<> triangle_intersecter(vertices, faces, /* stride */sizeof(float) * 3);
nanort::Ray<float> ray;
// fill ray org and ray dir.
...
// fill minimum and maximum hit distance.
ray.min_t = 0.0f;
ray.max_t = 1.0e+30f;
nanort::TriangleIntersection<float> isect;
// Store nearest hit point to `isect` and returns true if the hit point found.
BVHTraceOptions trace_options; // optional
bool hit = accel.Traverse(ray, triangle_intersecter, &isect, trace_options);Application must prepare geometric information and store it in linear array.
For a builtin Triangle intersector,
vertices: The array of triangle vertices (e.g. xyz * numVertices)faces: The array of triangle face indices (3 * numFaces)stride: Byte stride of each vertex data
are required attributes.
// NanoRT defines template based class, so no NANORT_IMPLEMENTATION anymore.
#include "nanort.h"
Mesh mesh;
// load mesh data...
nanort::BVHBuildOptions<float> options; // Use default option
nanort::TriangleMesh<float> triangle_mesh(mesh.vertices, mesh.faces, /* stride */sizeof(float) * 3);
nanort::TriangleSAHPred<float> triangle_pred(mesh.vertices, mesh.faces, /* stride */sizeof(float) * 3);
nanort::BVHAccel<float> accel;
ret = accel.Build(mesh.vertices, mesh.faces, mesh.num_faces, options);
assert(ret);
nanort::BVHBuildStatistics stats = accel.GetStatistics();
printf(" BVH statistics:\n");
printf(" # of leaf nodes: %d\n", stats.num_leaf_nodes);
printf(" # of branch nodes: %d\n", stats.num_branch_nodes);
printf(" Max tree depth : %d\n", stats.max_tree_depth);
std::vector<float> rgb(width * height * 3, 0.0f);
const float tFar = 1.0e+30f;
// Shoot rays.
#ifdef _OPENMP
#pragma omp parallel for
#endif
for (int y = 0; y < height; y++) {
for (int x = 0; x < width; x++) {
BVHTraceOptions trace_options;
// Simple camera. change eye pos and direction fit to .obj model.
nanort::Ray<float> ray;
ray.min_t = 0.0f;
ray.max_t = tFar;
ray.org[0] = 0.0f;
ray.org[1] = 5.0f;
ray.org[2] = 20.0f;
float3 dir;
dir[0] = (x / (float)width) - 0.5f;
dir[1] = (y / (float)height) - 0.5f;
dir[2] = -1.0f;
dir.normalize();
ray.dir[0] = dir[0];
ray.dir[1] = dir[1];
ray.dir[2] = dir[2];
nanort::TriangleIntersector<> triangle_intersecter(mesh.vertices, mesh.faces, /* stride */sizeof(float) * 3);
nanort::TriangleIntersection<> isect,
bool hit = accel.Traverse(ray, triangle_intersector, &isect, trace_options);
if (hit) {
// Write your shader here.
float3 normal;
unsigned int fid = triangle_intersector.intersect.prim_id;
normal[0] = mesh.facevarying_normals[3*3*fid+0]; // @todo { interpolate normal }
normal[1] = mesh.facevarying_normals[3*3*fid+1];
normal[2] = mesh.facevarying_normals[3*3*fid+2];
// Flip Y
rgb[3 * ((height - y - 1) * width + x) + 0] = fabsf(normal[0]);
rgb[3 * ((height - y - 1) * width + x) + 1] = fabsf(normal[1]);
rgb[3 * ((height - y - 1) * width + x) + 2] = fabsf(normal[2]);
}
}
}NANORT_USE_CPP11_FEATURE : Enable C++11 feature
NANORT_ENABLE_PARALLEL_BUILD : Enable parallel BVH build(OpenMP version is not yet fully tested).
See examples directory for example renderer using NanoRT.
- examples/path_tracer Path tracer example by https://github.com/daseyb
- Better ortho basis generation: Building an Orthonormal Basis, Revisited http://jcgt.org/published/0006/01/01/
- examples/bidir_path_tracer Bi-directional path tracer example by https://github.com/tatsy
- examples/gui Simple renderer with GUI(using ImGui)
- examples/vrcamera Stereo VR Camera
- examples/objrender Render wavefront .obj model using NanoRT.
- examples/par_msquare Render heightfield by converting it to meshes using par_msquare(marching squares)
- examples/las Visualize LiDAR(LAS) point cloud as sphere geometry.
- examples/double_precision Double precision triangle geometry and BVH.
- examples/embree-api NanoRT implementation of Embree API.
- examples/ptex Ptex texturing.
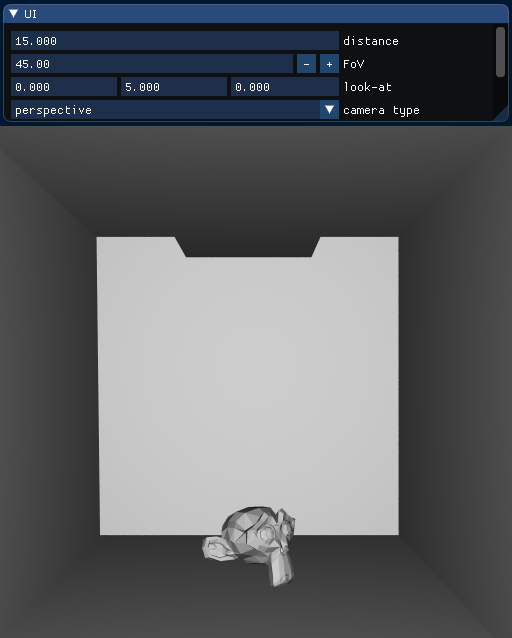
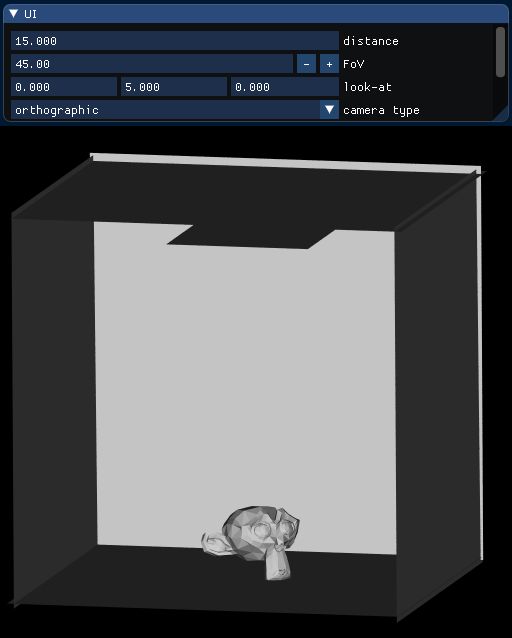
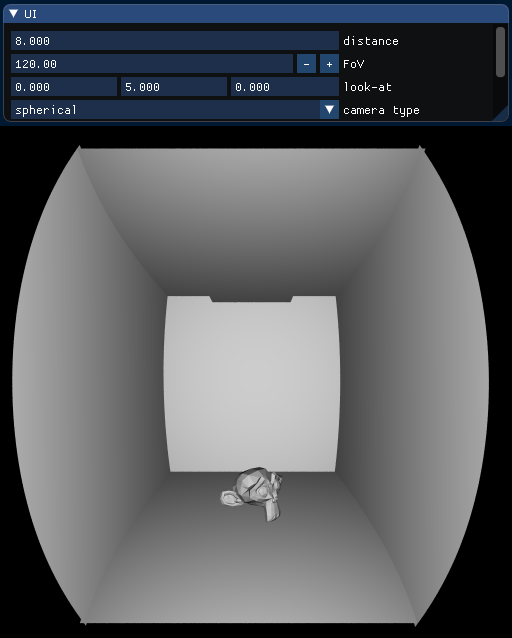
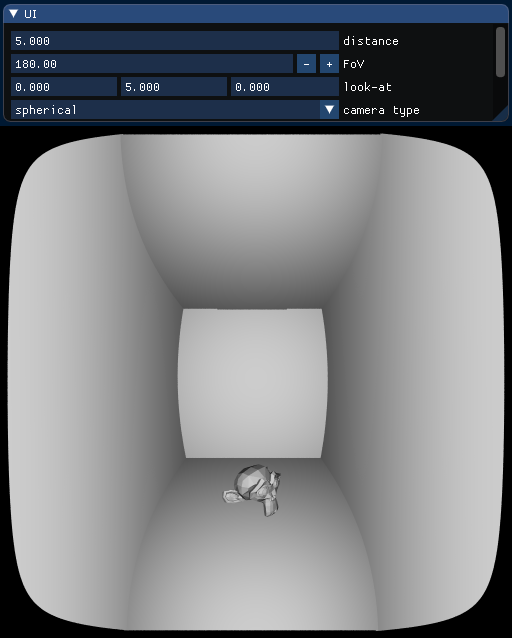
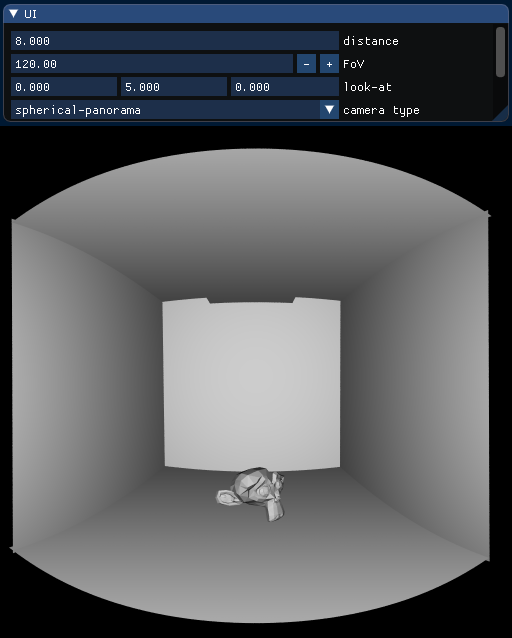
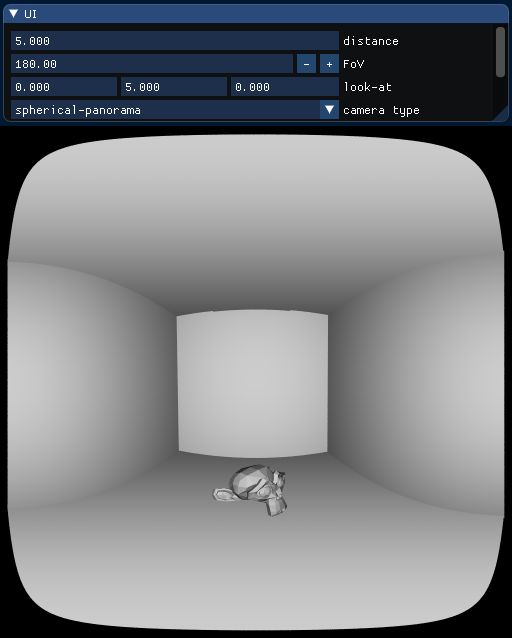
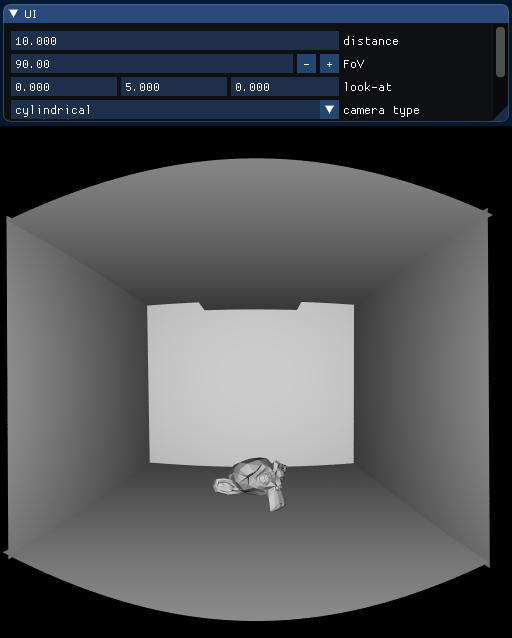
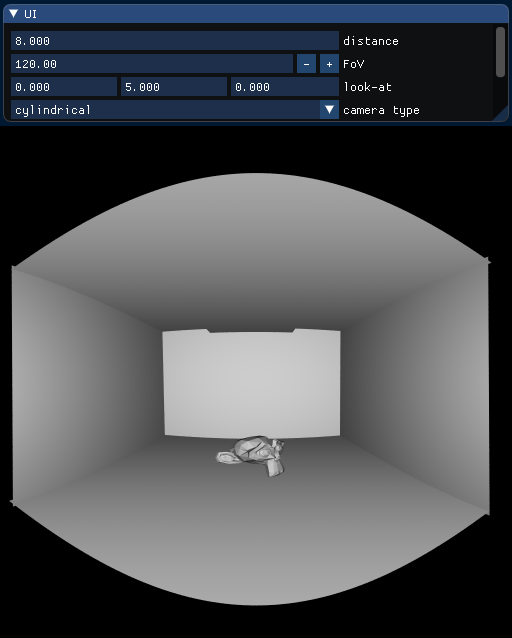
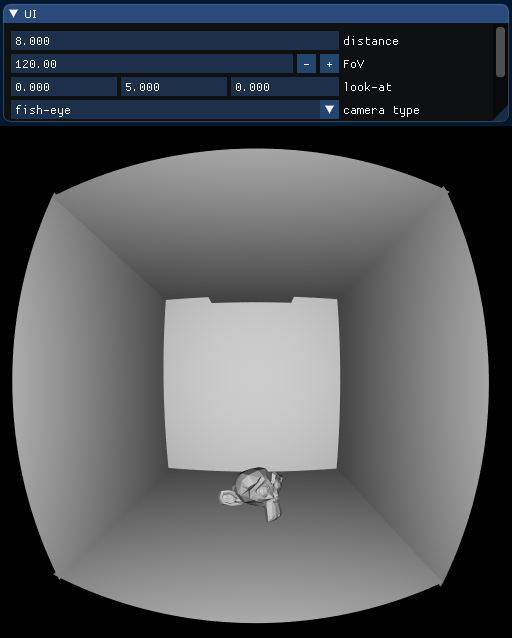
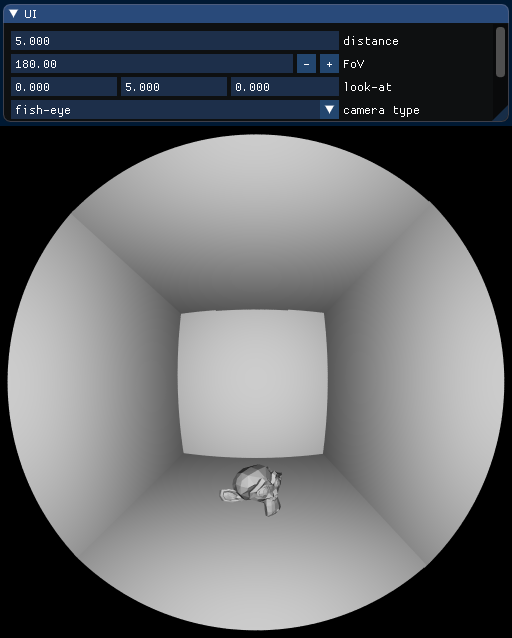
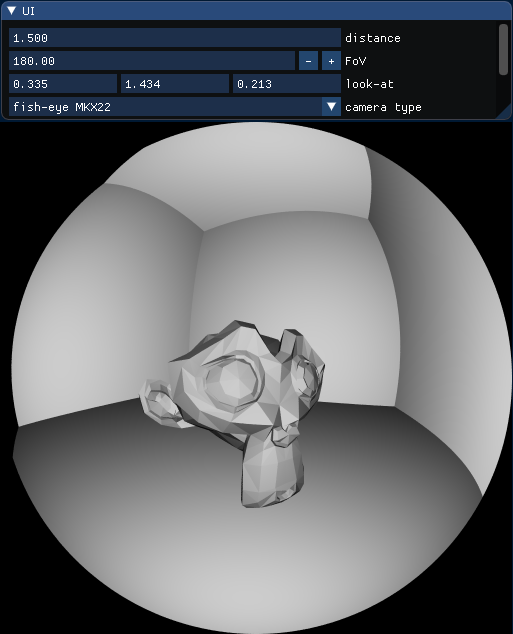
Raytracing allows to implement different camera models quite easily. See examples/gui for different camera
models which can be set via the config.json or the GUI itself:
perspective
orthographic
sphericalFoV 120 & 180:
spherical-panoramaFoV 120 & 180:
cylindrical: FoV 90 & 120:
fish-eye: FoV 120 & 180:
fish-eye MKX22: nonlinear fish-eye lens "iZugar MKX22 Fisheye Lens" with fixed FoV 220:











Here is an example of custom geometry.
- Spheres(particles)
examples/particle_primitive/ - Cubic Bezier Curves
- Approximate as lines
examples/curves_primitive/ - Recursive Ray-Bezier intersection.
- Approximate as lines
- Cylinders
examples/cylinder_primitive/
And plesae see API at wiki: https://github.com/lighttransport/nanort/wiki/API
nanort.h is licensed under MIT license.
NanoRT uses stack_container.h which is licensed under:
// Copyright (c) 2006-2008 The Chromium Authors. All rights reserved.
// Use of this source code is governed by a BSD-style license that can be
// found in the LICENSE file.
NanoRT examples use some external third party libraries. Licenses for such third party libraries obey their own license.
Lucy statue model is from The Stanford 3D Scanning Repository http://graphics.stanford.edu/data/3Dscanrep/
PR are always welcome!
- Optimize ray tracing kernel
- Efficient Ray Tracing Kernels for Modern CPU Architectures http://jcgt.org/published/0004/04/05/
- ARM NEON SIMD
- Intel SSE SIMD
- Better cmake build.
- Implement more Embree compatible API.
- Scene graph support.
- NanoSG, Minimal scene graph library. examples/nanosg
- Instancing support.
- Fix multi-hit ray traversal.
- Optimize Multi-hit ray traversal for BVH.
- Ray traversal option.
- FaceID range.
- Double sided on/off.
- Ray offset.
- Avoid self-intersection(BVHTraceOptions.skip_prim_id).
- Custom intersection filter through C++ template.
- Fast BVH build
- Bonsai: Rapid Bounding Volume Hierarchy Generation using Mini Trees http://jcgt.org/published/0004/03/02/
- Efficient BVH build
- Spatial split BVH
- Motion blur
- STBVH: A Spatial-Temporal BVH for Efficient Multi-Segment Motion Blur http://www.highperformancegraphics.org/2017/program/
- Fast, Accurate ray curve intersection
- Phantom Ray-Hair Intersector
- Example bi-directional path tracing renderer by @tatsy.