Convert range data from ultrasound/lidar topics (sensor_msgs::Range) to pointclouds (sensor_msgs::PointCloud2)
- Change directory to your catkin workspace source directory
cd ~/catkin_ws/src - Clone the repository to your catkin workspace
git clone https://github.com/eliotlim/sensor_pointcloud
- Build the package from source by performing
catkin_make
- Execute
roslaunch sensor_pointcloud sensor_pointcloud.launch
- This will load
sensor_pointcloud/sensorConfig.yamlinto the node namespace by default.
- Load ros parameters using
rosparam - Call
rosrun sensor_pointcloud sensor_pointcloud_node
Please refer to this guide for details.
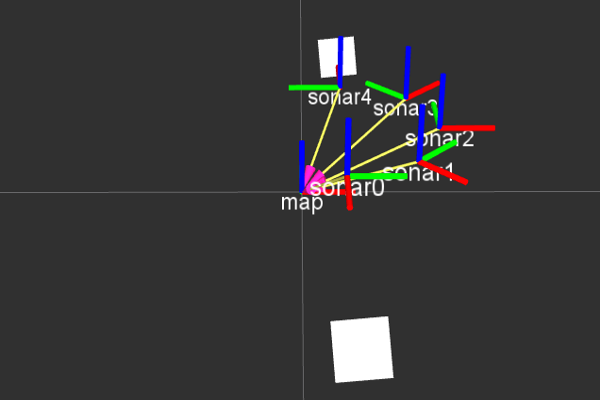
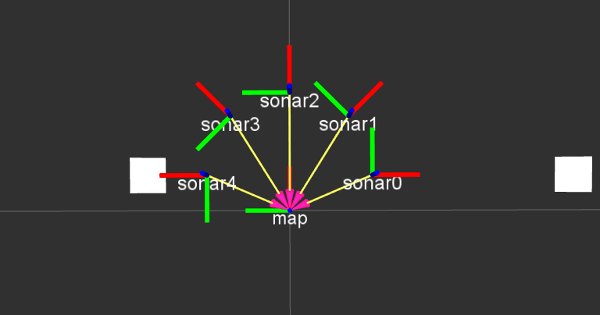
Launching the node using roslaunch with the default sensorConfig.yaml
will give you the following transform tree.


This library is licensed under the MIT License.