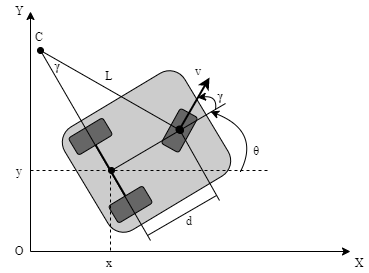
- The Type-1 of motion: Use the front wheel for both driving and steering
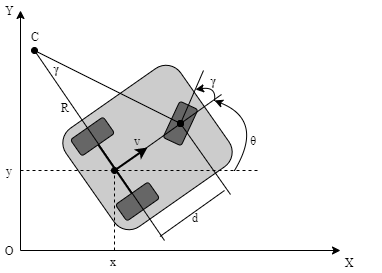
- The Type-1 of motion: Use the rear wheel for driving and the front wheel for steering


The results of the controller:








Requirement: MATLAB version 2016a or laster Download and Install:
$ git clone https://github.com/duynamrcv/tricycle_robot
Before runing, please configure the parameter. If you want to run with Type 1 of motrion control, change type = 1; or type = 2; for Type 2 of motion control in parameter.m.
First, run the parameter.m file to load all parameters.
Then, if you want to learn about Tracking problem, select tricycle_v2.slx
If you want to learn about Localization, select kalman.m
We used some files to show the simulation results:
test_model.mto plot the information of robots before doing another tasks.tracking.mto plot the tracking results.
Other .m files are the functions used to implementation and .mat files are the information of input/output.
The problems is presented in the problem.
The summary and implement all above problems are available in the document.