A mobile robot simulator for bridging theory and practice in robotics.
Sim.I.am is an open-source mobile robot simulator for MATLAB and Simulink that facilitates the implementation and design of controllers and algorithms that can be deployed on both simulated and actual mobile robots.
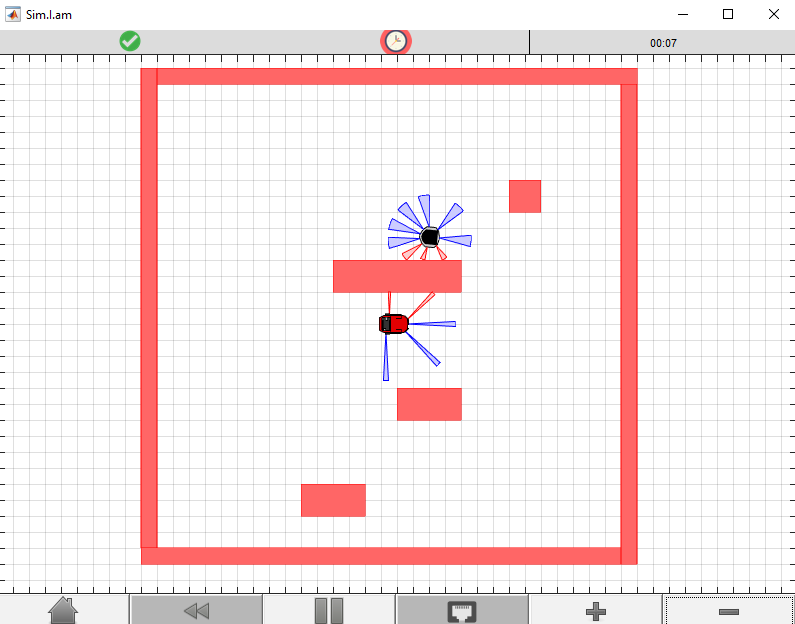
The MATLAB app is a demo of a multi-agent application, where one robot follows the other robot through a cluttered environment as shown in the screenshot below. A manual is included to help learn how to get started with the simulator. It provides as set of programming exercises focused on how to implement the mobile robot navigation system found in the app from scratch.
Sim.I.am is maintained by the Georgia Robotics and InTelligent (GRITS) Laboratory at the Georgia Institute of Technology. The official project page is located at http://gritslab.gatech.edu/projects/robot-simulator.
Originally developed by Jean-Pierre de la Croix and Added support for MATLAB 2014b and Later by Sayan Seth
Alternatively, You can download the App from MATLAB Central File Exchange