[ARM64 Android Device]

[X64 Windows Device with USB Camera]

- Windows 11
- Android 13
- Unity 2020.3.21f1
- Android Studio 2022.1.1
- Visual Studio 2019
- OpenCV 4.6
- ORB-SLAM2
-
The system locator is built based on ORB-SLAM2 which simplified the
viewermodule. To config SLAM system, go to directory${Unity_project}/Config/ORB.yaml. -
View more details at
SLAM_lib/readme.md.
-
The system render is based on Unity3D. The shared library of SLAM system built with Visual Studio 2019 is at directory
${Unity_project}/Assets/Plugins/locator.dll. -
Press
PUTbutton to re-put the AR model, which will look at the camera.PressDEBUGbutton to view track points on slam-system, the plane detected and the original point of the world-coordinate-system. -
At first time use, you may need to place
${Unity_project}/Assets/MainScene.unityto the scene list and remove the original one.
-
The system now is available on Android devices. You should check the
jnilibsdirectory so that youc can build the application successfully. Especially, thelibc++_shared.sois required but it is not included when exported from Unity3D. -
To use the app, don't forget to grant the camera permission. On the UI, you can press
PUTbutton to re-put the AR model, which will look at the camera just as it done on windows. PressDEBUGbutton to view track points on slam-system, the plane detected and the original point of the world-coordinate-system. -
The Sparrow model will randomly change its animation from 5s to 15s. You can also manually change the animation by pressing the
CHANGEbutton. To change the scale of the model, pressingSCALE-andSCALE+buttons. -
It is now tested to put a tetra on the plane detected, which is drawn by
OpenCVinstead of unity3D. Press the buttonTetrato take a try. -
[NOTICE] When first installing the app, you need to copy the
Configfolder to the/storage/emulated/0/Android/data/com.labx.arlab/files/directory so that the app can find config files. The zipped file ofConfigfolder is in theAssetsdirectory of the repo and also at thereleasepage. -
[IMPORTANT] To make your AR model more accurate, you'd better calibrate your camera and set calibtation parameters in the 'Config/ORB.yaml' file. Pay attention that the camera is opened as
480*640, and the scene is set fitting the width of your device. So theCamera.fxandCamera.fyare better set base on testing your own devices. As a reference, theCamera.fxandCamera.fyof device with height of1080are all set to1320.
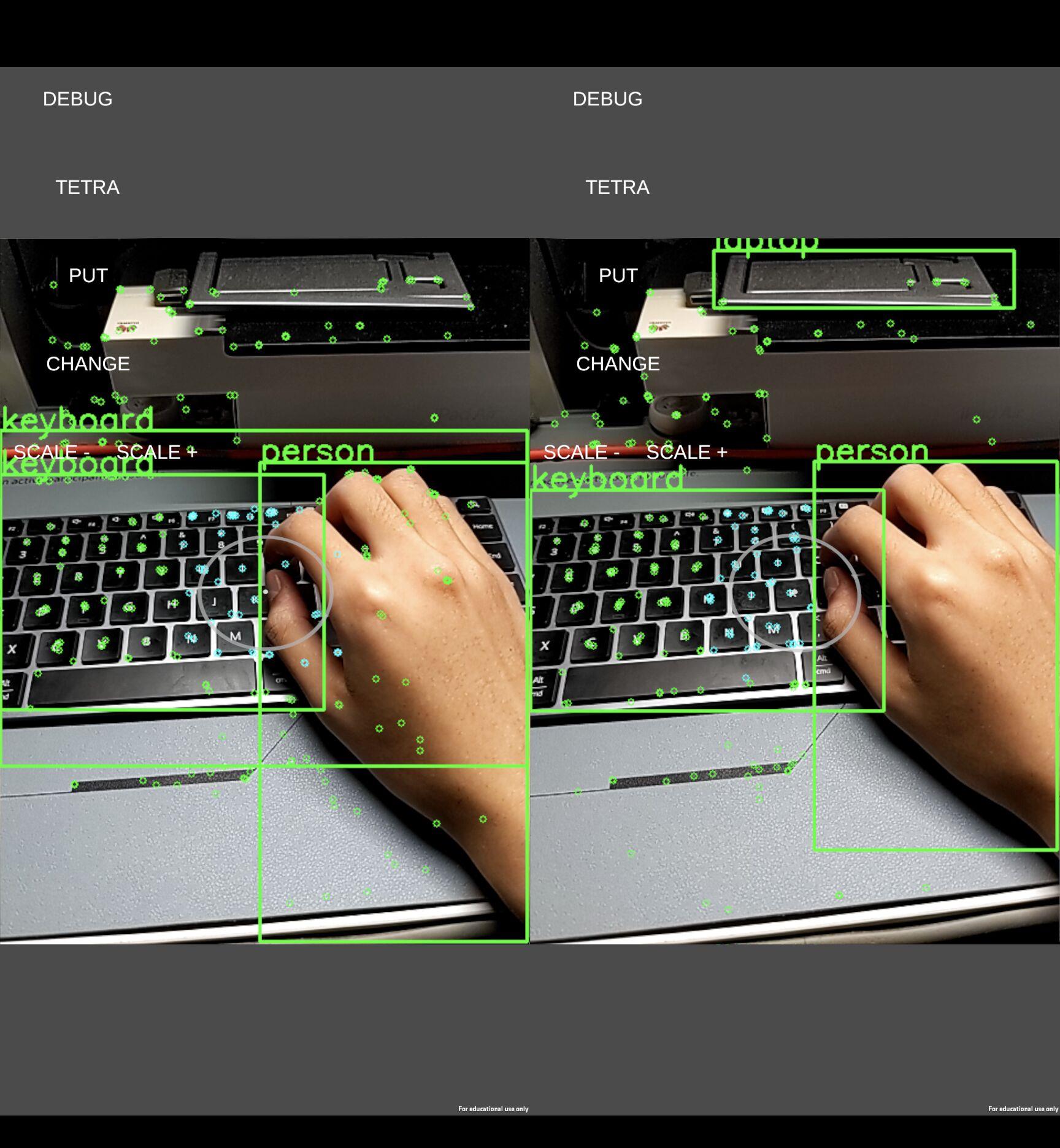
YoloV5are now integrated into the project (arm64) to solve the problem of dynamic-objects andcoverd-objects. Now the system is able to delete the key points which are in the bounding box of the detected dynamic objects. However, the system is just simply classify the dynamic-objects with a high percentage in daily life, such aspersons,animals, etc. Yolo is not able to really detected dynamic objects.- The
YoloV5, using the offical model, is based onNCNNbytencent, which is aimed at improving the speed of image processing. The system running onGoogle Pixel 5(with Qualcomm Snapdragon 765G) get above 15 fps. - This is a snap shot to show the result of dynamic-objects points exception. The right picture is using yolo while the left not.

- MORE interactive operations
- MORE beautiful user-interface
- IMPROVE the tracking effect of SLAM system
- IMPROVE the accuracy of plane detected on SLAM system
- IMPORT
Yoloto solve the problem of dynamic objects - USING
Yoloto solve the problem of covered objects - EXPORT and build application for
Androiddevices
To contact with the author, please send email to jianxf@bupt.edu.cn