Liyuan Zhu1 · Yue Li2 · Erik Sandström3 · Shengyu Huang3 · Konrad Schindler3 · Iro Armeni1
International Conference on 3D Vision (3DV) 2025
1Stanford University · 2University of Amsterdam · 3ETH Zurich

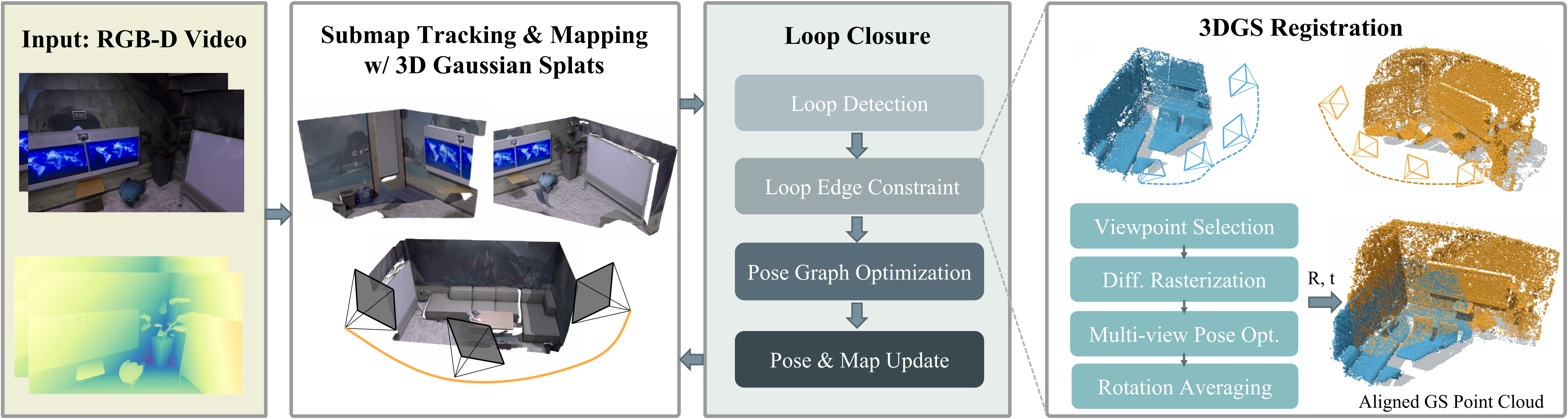
LoopSplat is a coupled RGB-D SLAM system that uses Gaussian splats as a unified scene representation for tracking, mapping, and maintaining global consistency. In the front-end, it continuously estimates the camera position while constructing the scene using Gaussian splats submaps. When the camera traverses beyond a predefined threshold, the current submap is finalized, and a new one is initiated. Concurrently, the back-end loop closure module monitors for location revisits. Upon detecting a loop, the system generates a pose graph, incorporating loop edge constraints derived from our proposed 3DGS registration. Subsequently, pose graph optimization (PGO) is executed to refine both camera poses and submaps, ensuring overall spatial coherence.
The code has been tested on:
- Ubuntu 22.04 LTS, Python 3.10.14, CUDA 12.2, GeForce RTX 4090/RTX 3090
- CentOS Linux 7, Python 3.12.1, CUDA 12.4, A100/A6000
Clone the repo with --recursive because we have submodules:
git clone --recursive git@github.com:GradientSpaces/LoopSplat.git
cd LoopSplat
Make sure that gcc and g++ paths on your system are exported:
export CC=<gcc path>
export CXX=<g++ path>
To find the gcc path and g++ path on your machine you can use which gcc.
Then setup environment from the provided conda environment file,
conda create -n loop_splat -c nvidia/label/cuda-12.1.0 cuda=12.1 cuda-toolkit=12.1 cuda-nvcc=12.1
conda env update --file environment.yml --prune
conda activate loop_splat
pip install -r requirements.txt
You will also need to install hloc for loop detection and 3DGS registration.
cd thirdparty/Hierarchical-Localization
python -m pip install -e .
cd ../..
We tested our code on RTX4090 and RTX A6000 GPUs respectively and Ubuntu22 and CentOS7.5.
Here we elaborate on how to load the necessary data, configure Gaussian-SLAM for your use-case, debug it, and how to reproduce the results mentioned in the paper.
We tested our code on Replica, TUM_RGBD, ScanNet, and ScanNet++ datasets. We also provide scripts for downloading Replica and TUM_RGBD in scripts folder. Install git lfs before using the scripts by running git lfs install.
For reconstruction evaluation on Replica, we follow Co-SLAM mesh culling protocal, please use their code to process the mesh first.
For downloading ScanNet, follow the procedure described on here.
Pay attention! There are some frames in ScanNet with inf poses, we filter them out using the jupyter notebook scripts/scannet_preprocess.ipynb. Please change the path to your ScanNet data and run the cells.
For downloading ScanNet++, follow the procedure described on here.
The config files are named after the sequences that we used for our method.
Start the system with the command:
python run_slam.py configs/<dataset_name>/<config_name> --input_path <path_to_the_scene> --output_path <output_path>
You can also configure input and output paths in the config yaml file.
You can reproduce the results for a single scene by running:
python run_slam.py configs/<dataset_name>/<config_name> --input_path <path_to_the_scene> --output_path <output_path>
If you are running on a SLURM cluster, you can reproduce the results for all scenes in a dataset by running the script:
./scripts/reproduce_sbatch.sh
Please note the evaluation of depth_L1 metric requires reconstruction of the mesh, which in turns requires headless installation of open3d if you are running on a cluster.
If you have any questions regarding this project, please contact Liyuan Zhu (liyzhu@stanford.edu). If you want to use our intermediate results for qualitative comparisons, please reach out to the same email.
Our implementation is heavily based on Gaussian-SLAM and MonoGS. We thank the authors for their open-source contributions. If you use the code that is based on their contribution, please cite them as well. We thank Jianhao Zheng for the help with datasets and Yue Pan for the fruitful discussion.
If you find our paper and code useful, please cite us:
@misc{zhu2024_loopsplat,
title={LoopSplat: Loop Closure by Registering 3D Gaussian Splats},
author={Liyuan Zhu and Yue Li and Erik Sandström and Shengyu Huang and Konrad Schindler and Iro Armeni},
year={2024},
eprint={2408.10154},
archivePrefix={arXiv},
primaryClass={cs.CV}
}