Training a quadcopter to take off using Actor-Critic approach based DDPG algorithm.
- Observation Space: size = 12
- x,y,z coordinates: size = 3
- Euler Angles (phi.theta,psi): size = 3
- Velocities along the 3 axis (v_x,v_y,v_z): size = 3
- Angular Velocities (v_phi,v_theta,v_psi): size = 3
- Control Modes: 2
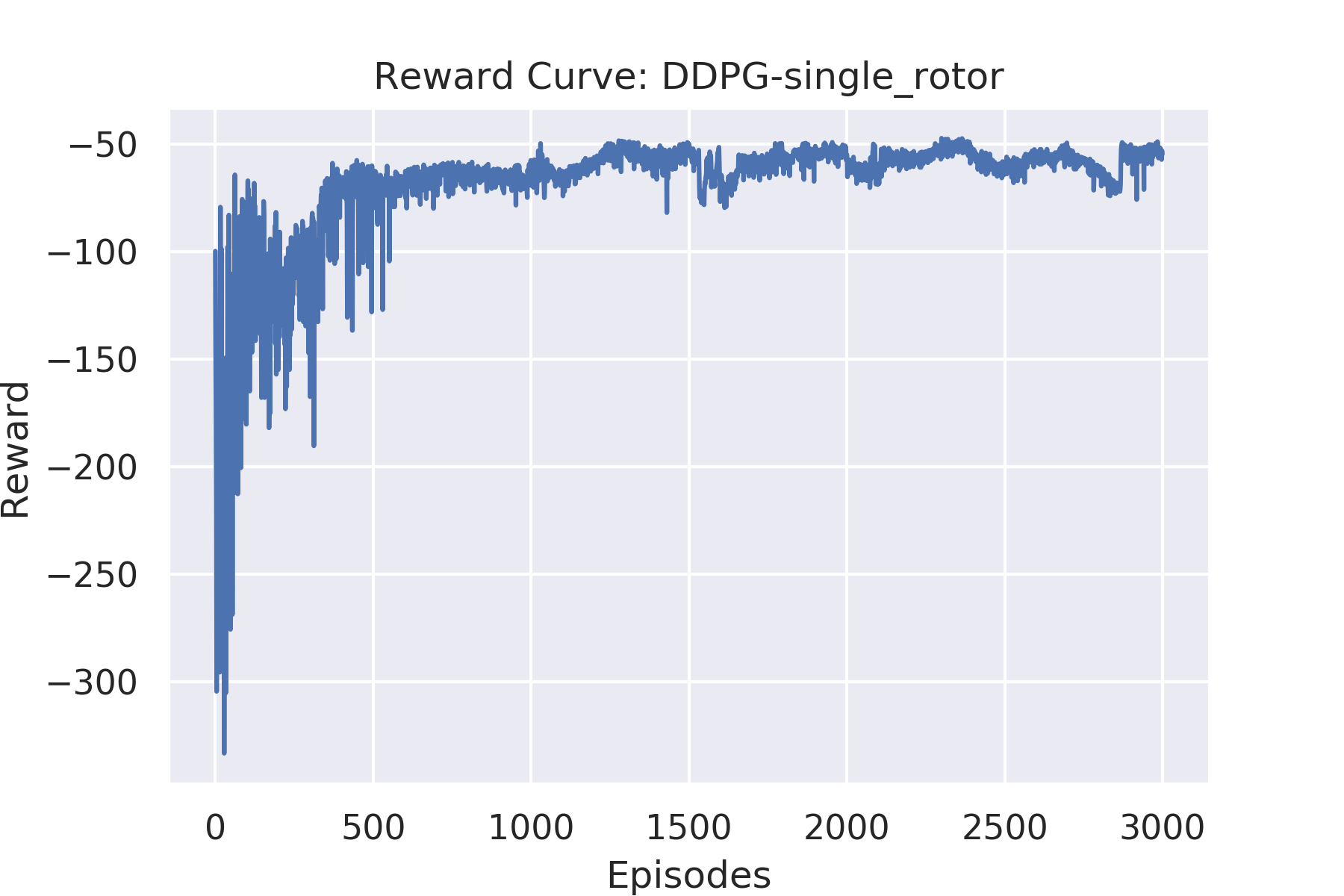
- Single rotor mode: all rotor speeds are equal
- Multi rotor mode: all rotors are independent
- Action Space
- Size = 1 for single rotor mode
- Size = 4 for multi rotor mode
- Boundary: 300 x 300 x 300 m
- X: -150 --> 150 m
- Y: -150 --> 150 m
- Z: 0 --> 300 m
- Boundary Conditions
- Hitting any of the environment boundaries leads to immediate termination of the episode
- In addition, the
sim.in_boundsflag is set to False, which can be used to assign any additional penalty for such a behaviour
The project was built with the following configuration:
- Ubuntu 16.04
- CUDA 10.0
- CUDNN 7.4
- Python 3.6
- Pytorch 1.0
Though not tested, the project can still be expected to work out of the box for most reasonably deviant configurations.
- Create separate virtual environment for the project using the provided
environment.ymlfile
conda env create -f environment.yml
conda activate quad
- Clone the repository (if you haven't already!)
git clone https://github.com/1jsingh/RL_quadcopter.git
cd RL_quadcopter- Follow along with either
Quadcopter-single_rotor.ipynborQuadcopter-multi_rotor.ipynbto train your own RL agent.
task.py: quadcopter agent reward formulationagents/:model.py: actor and critic modelsddpg_agent.py: combined ddpg agent with Replay buffer and OU Noiseddpg_agent_per.py: ddpg agent with prioritised experience replaySumTree.py: sumtree implementation for perbst.py: fixed size binary search tree for per
physics_sim.py: simulator for the quadcopter. DO NOT MODIFY THIS FILE.Quadcopter-single_rotor.ipynb: notebook for training quad in single rotor control modeQuadcopter-multi_rotor.ipynb: notebook for training quad in multi rotor control mode
-
The quadcopter agent is trained using Actor-Critic based DDPG algorithm.
-
The Replay buffer is implemented using optimized prioritised experience replay.
The concept of using prioritised experience replay is to sample experiences with higher TD errors with a higher probability.
However, doing so comes at the cost of higher sampling and update times to the experience buffer {D}.
The following shows the time complexity for key operations required for PER:
- Compute max priority from the experience replay: O(n)
- Compute sum of priorities for all samples from the experience replay: O(n)
- Insertion of new samples in the experience replay: O(1)
Thus time complexity for a naive implementation for PER : O(n)
In order to work around this problem, the implementation uses:
- SumTree data structure for O(1) computation of sum of priorities
- Fixed size binary search tree implementation for computing max priority in O(log(n)) time
Time complexity for fixed size binary search tree based optimized implementation of PER:
- Compute max priority from the experience replay: O(log(n))
- Compute sum of priorities for all samples from the experience replay: O(1)
- Insertion of new samples in the experience replay: O(1)
Thus the overall time complexity for optimized implementation of PER: O(log(n))
-
Reward function
-
Reward Curve
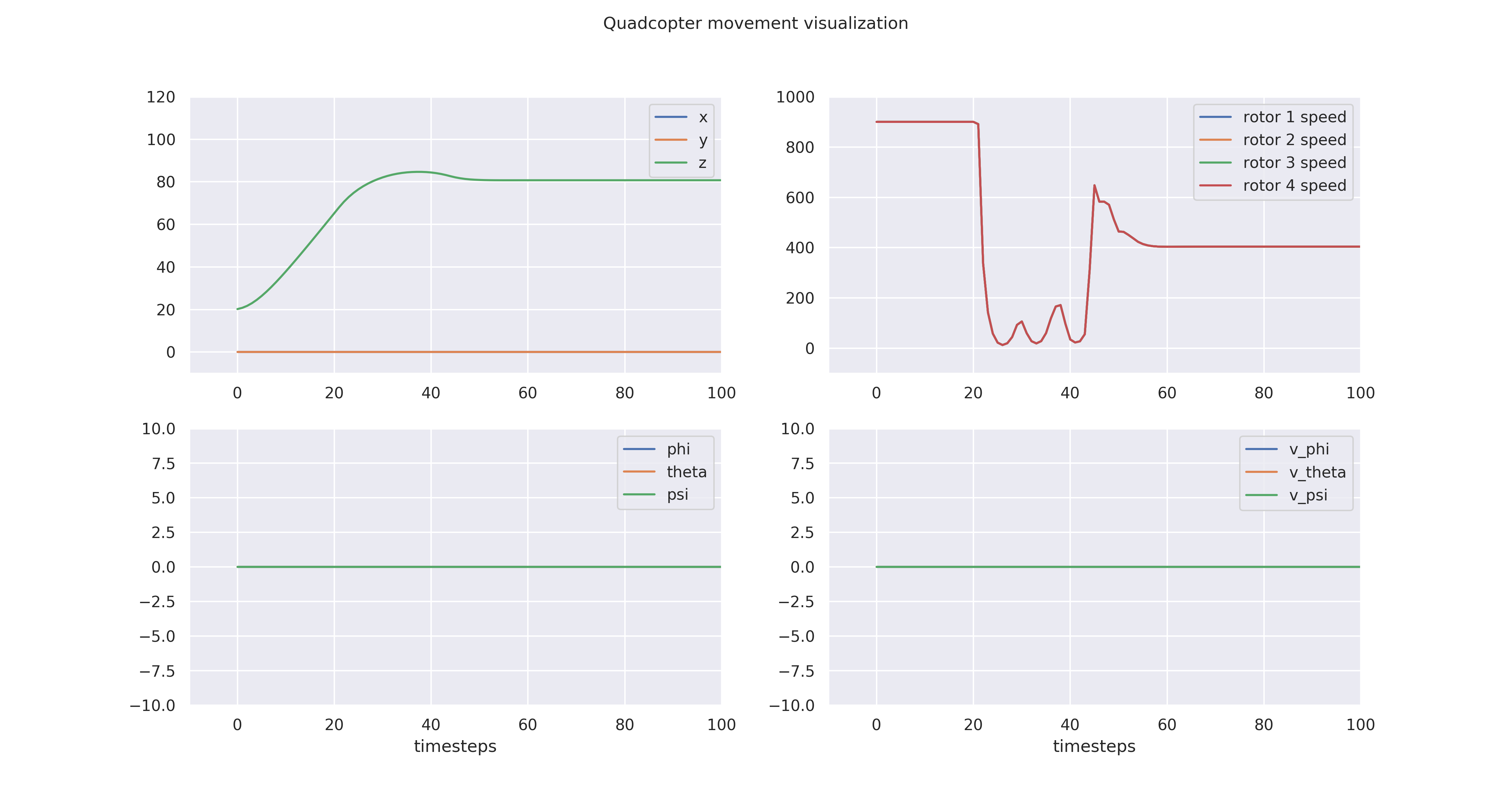
-
Quadcopter movement visualization


-
Reward function
Due to the reduced stability in multi rotor mode, adding a constant positive reward of +1 at each time step, helps the agent to learn to stay afloat for a longer time duration -
Reward Curve
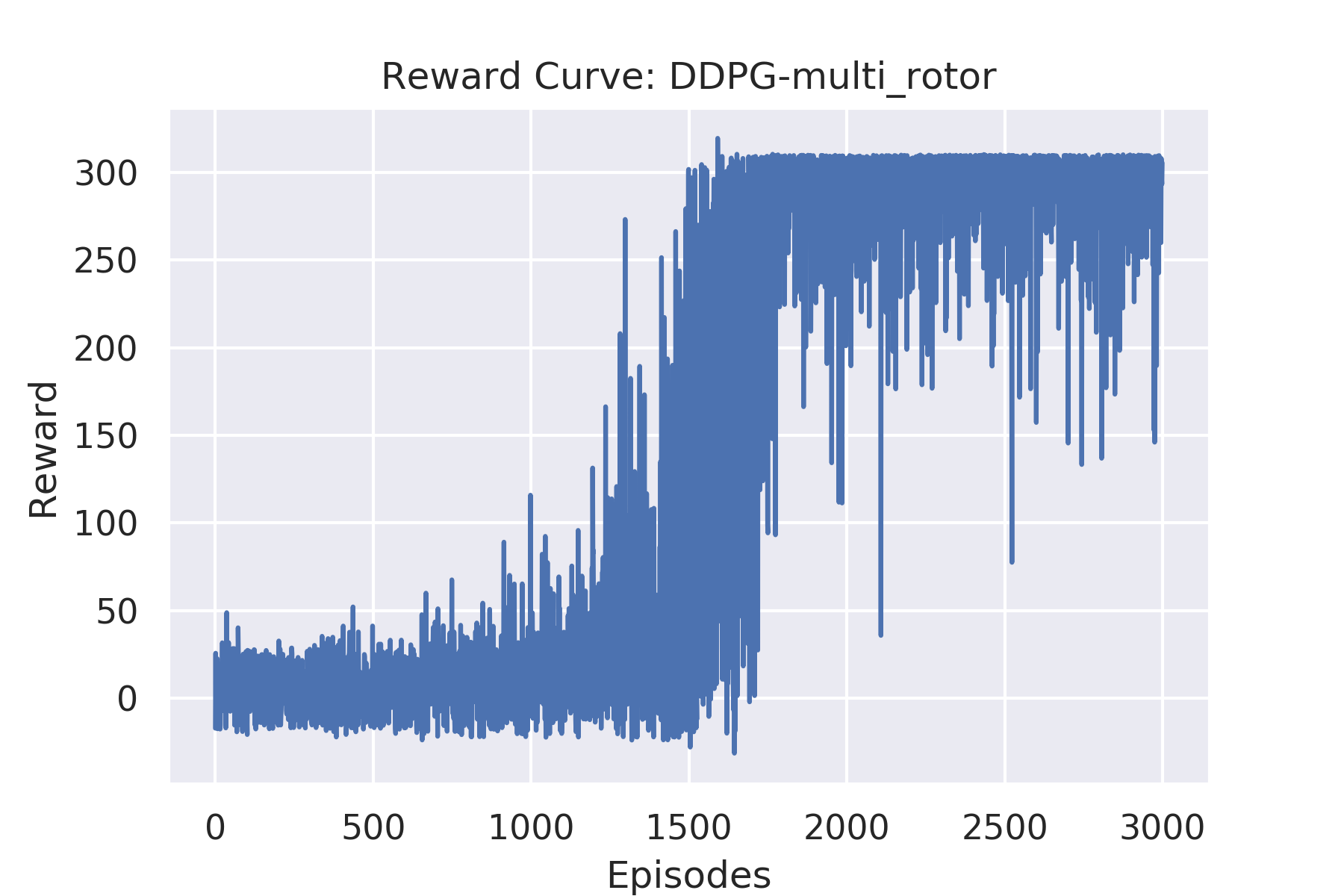
-
Quadcopter movement visualization
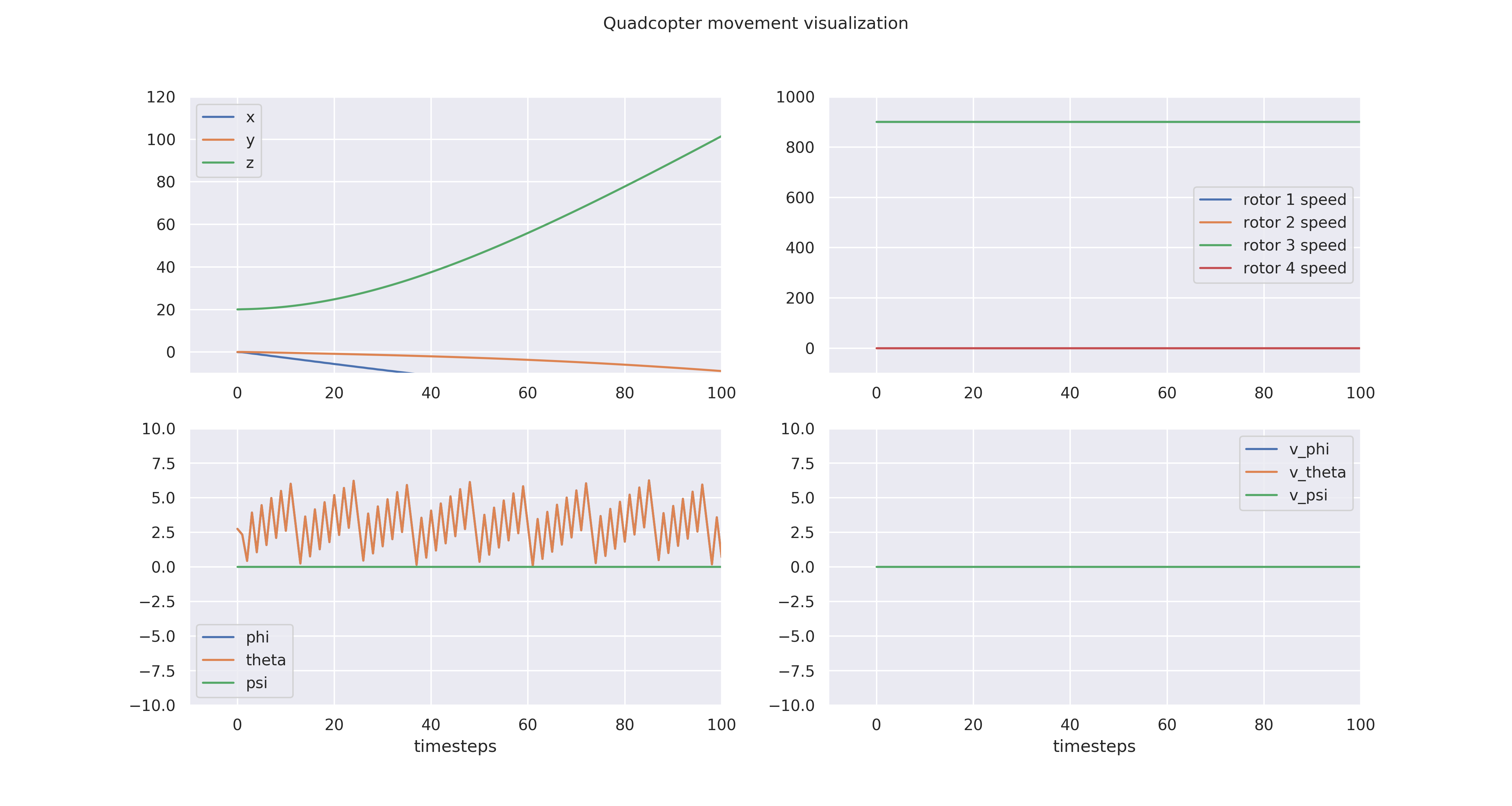
Note that the multi-rotor quadcopter agent does not perform as well as the single rotor agent


- Lillicrap, Timothy P., et al. "Continuous control with deep reinforcement learning." arXiv preprint arXiv:1509.02971 (2015).
- Schaul, Tom, et al. "Prioritized experience replay." arXiv preprint arXiv:1511.05952 (2015).
- SumTree implementation: https://github.com/rlcode/per/blob/master/SumTree.py