RTE contains a lot of useful scripts for research works (what is new?) , which is based on RTB of Peter Corke.
The introduction of RTB of Peter Corke, see here.
-
New function for
SE2,SE3.SE2.q: Get translation and angle in a row vector.SE3.qrpy/SE3.qeul: Construct an SE(3) object from translation and rpy/eul anglesSE3.toqrpy/SE3.toqeul: Get translation and rpy/eul angle in a row vector.SE2.q,SE3.qrpy,SE3.qeulsupport both 1x3 and 1x6 vectors.
-
New
LineStyleoption forSE2.plotandSE3.plot. Example:SE3.plot('style','-.'). (4 styles: -. / : / .. / --) -
New functions for DH parameters and POE parameters. (See folder
src/robotics)poe2dh: Transfer POE parameters to DH parameters.dh2poe: Transfer DH parameters to POE parameters.
-
New
qlimoption forSerialLinkobject construction by DH parameters. (Qlim: m x 2 matrix)- Example:
SerialLink([dh,sigma], 'base', Hb, 'tool', Ht, 'qlim', Qlim).
- Example:
-
New classes for Mobile Robots. (See folder
src/roboticsandexample/model_tutorials)Cuboid: Rigid Cuboid 3D Model class (rpy).Cylinder: Rigid Cylinder 3D Model class (rpy).Youbot: Youbot Platform 3D Model class (rpy), inherited fromCuboid.Omniwheel: Mecanum Wheel 3D Model class (rpy), inherited fromCylinder.Platform: Mobile Platform 3D Model class (rpy), formed byYoubotandOmniwheel.


- New classes for Mobile Manipulator. (See folder
src/roboticsandexample/model_tutorials)MobileManipulator: Mobile Manipulator 3D Model class (rpy).MobilePlanarRevolute: Mobile Robot with Planar Revolute Manipulator 3D Model class (rpy, stdDH).

-
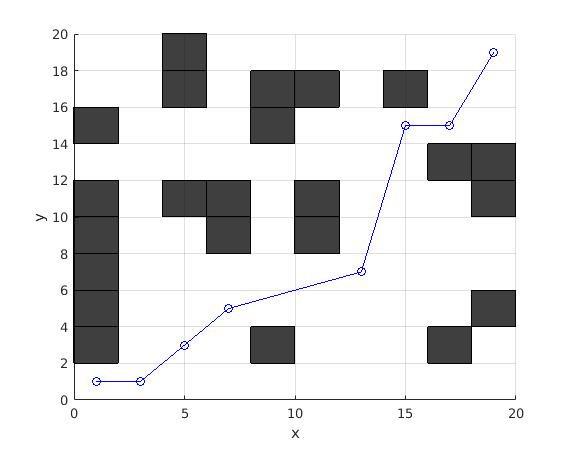
New functions for path planning. (See folder
src/planningandexample/path_planning).environment: Generate 3D obstacle environment with grid cell.ind2loc: Get real coordinate from map index.map2gphA: Transfer map matrix to adjancent matrix A of graph.dijkstra: Dijkstra algorithm for graph searching.astar: A* algorithm for graph searching.


For RTE, you can install it by following the procedures below.
-
git clone https://github.com/star2dust/Robotics-Toolbox.git -
Add the toolbox folder to MATLAB path.
-
Add
startup_rvcandstartup_rteto the last line of the filestartup.min your MATLAB default working folder (or run it directly). -
An example for
startup.m:% set toolpath toolpath = <the path where you put toolbox> % add robotics toolbox addpath([toolpath 'Robotics-Toolbox/rvctools/release10.3.1']) addpath([toolpath 'Robotics-Toolbox/rvcdlcs/src']) startup_rvc startup_rte
- P.I. Corke. (2017). Robotics, Vision & Control. Springer. ISBN 978-3-319-54413-7.
- Murray, R. M. (1994). A mathematical introduction to robotic manipulation. CRC press.
- Deits, R., & Tedrake, R. (2015). Computing large convex regions of obstacle-free space through semidefinite programming. Springer Tracts in Advanced Robotics, 107, 109-124.
- Wu, L., Crawford, R., & Roberts, J. (2017). An analytic approach to converting POE parameters into D-H parameters for serial-link robots. IEEE Robotics and Automation Letters, 2(4), 2174-2179.