Implementation of our ICRA'24 paper: IKLink: End-Effector Trajectory Tracking with Minimal Reconfigurations
[Pre-print] [Supplementary Video] [Poster]
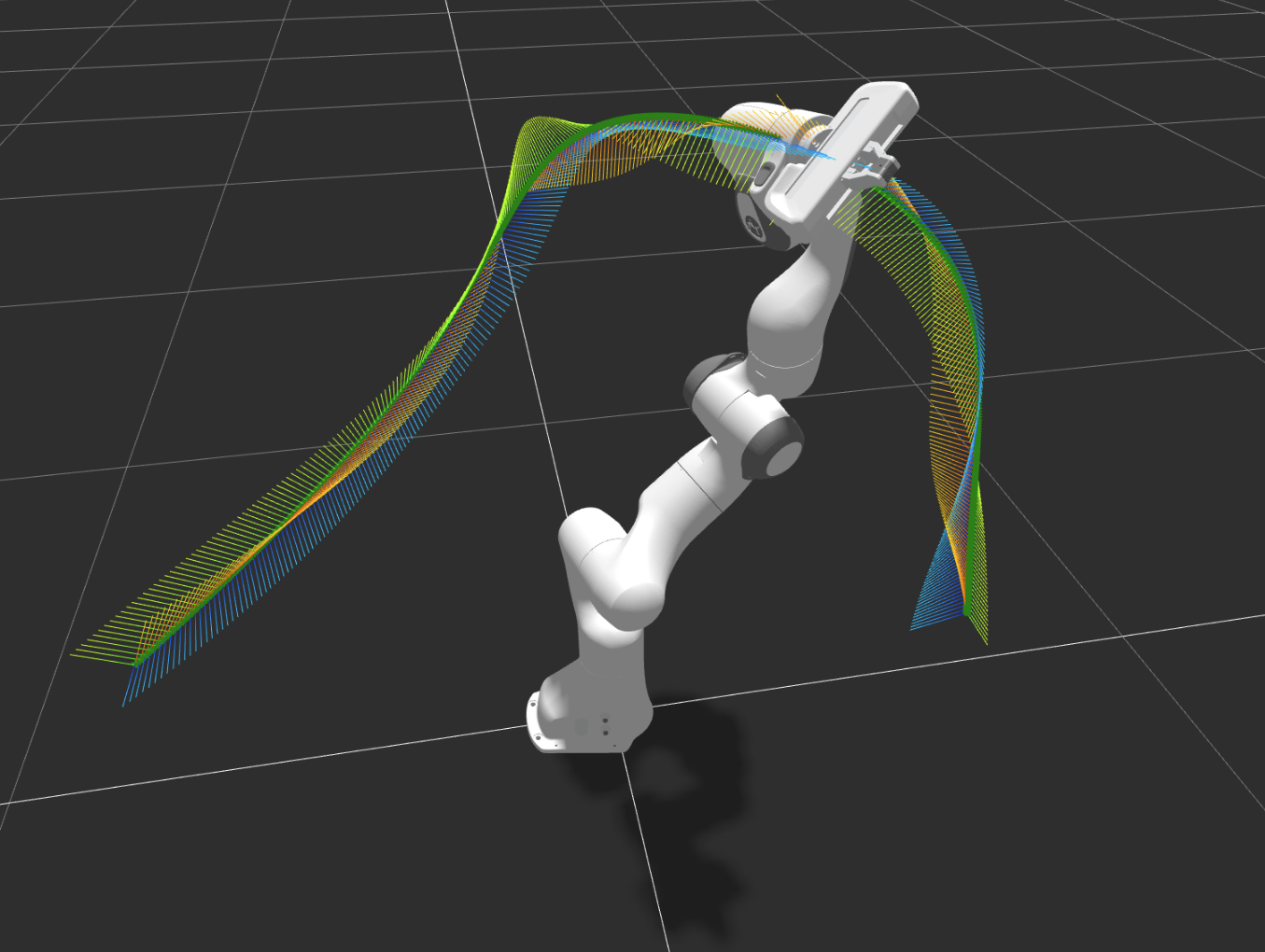
IKLink enables a robot manipulator to track reference end-effector trajectories of any complexity while performing minimal reconfigurations. IKLink eliminates the need to manually segment a long or complex trajectory and is beneficial in real-life scenarios that involve end-effector trajectory tracking, such as welding, sweeping, scanning, painting, and inspection. For more information, please refer to our paper.

-
Compile:
cargo build
-
Run a demo:
cargo run --bin traj_tracing
The demo processes end-effector trajectories in
input_trajectoriesand saves the generated motions inoutput_motions.We note that this Rust implementation is about 10x fasters than the Python implementation described in the paper.
-
Expected output:
Constructing nodes for point 0 / 767 Constructing nodes for point 1 / 767 ... Constructing nodes for point 766 / 767 Running dynamic programming algorithm Min Num of Reconfig: 2 Saved motion to: <some_dir>/iklink/output_motions/panda_2023-08-25_11-37-55.csv

@inproceedings{wang2024iklink,
title={ IKLink: End-Effector Trajectory Tracking with Minimal Reconfigurations},
author={Wang, Yeping and Sifferman, Carter and Gleicher Michael},
booktitle={2024 IEEE International Conference on Robotics and Automation (ICRA)},
year={2024},
organization={IEEE}
}