Efficient Human Pose Estimation via 3D Event Point Cloud
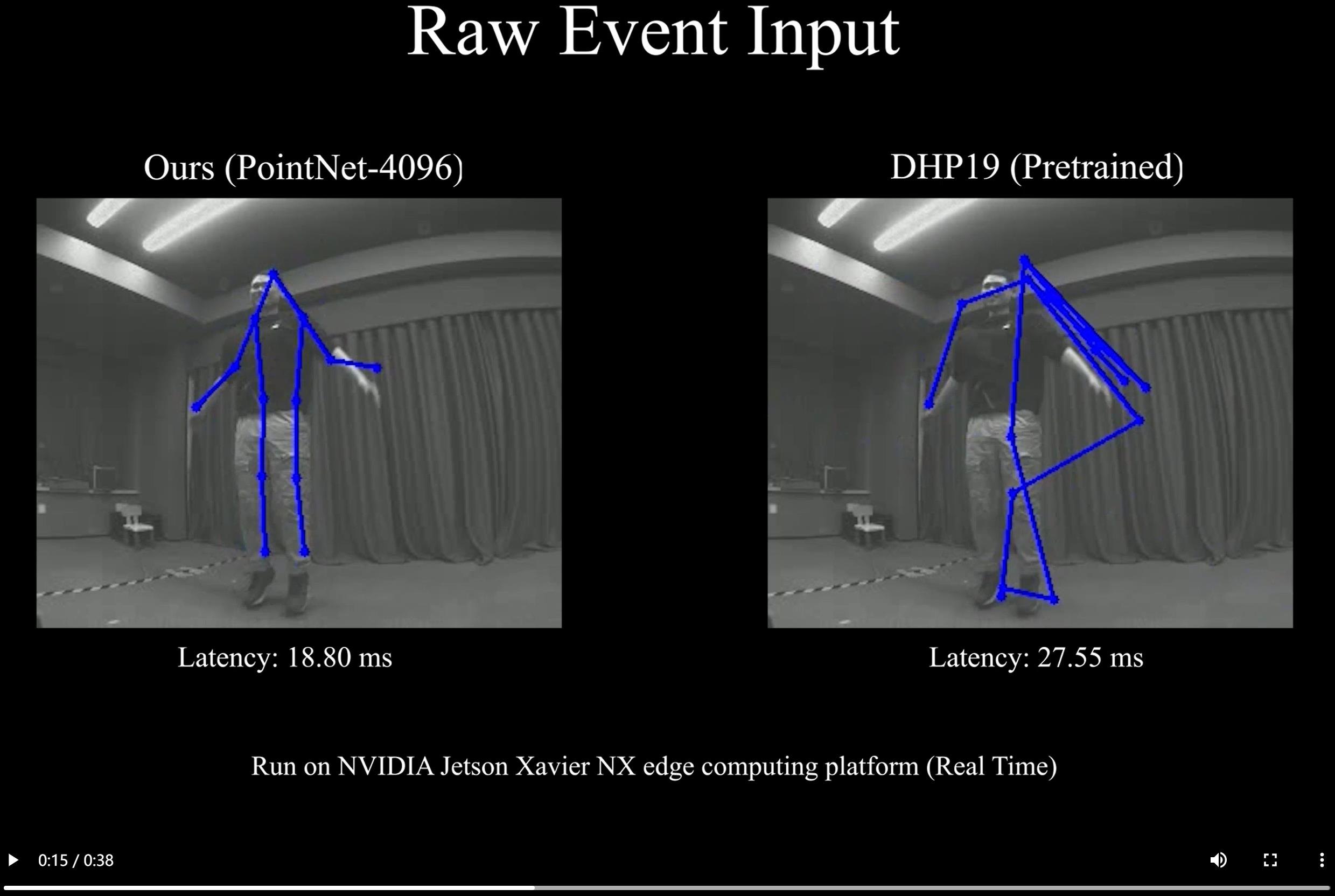
The official Pytorch implementations of Efficient Human Pose Estimation via 3D Event Point Cloud. We propose a novel 3D event point cloud based paradigm for human pose estimation and achieve efficient results on DHP19 dataset.
Project page and paper.

Dependencies
We test the project with the following dependencies.
- pytorch == 1.8.0+cu111
- torchvision == 0.9.0+cu111
- numpy == 1.19.2
- opencv-python == 4.4.0
- h5py == 3.3.0
- Win10 or Ubuntu18.04
Getting started
Dataset preparation
Download DHP19 dataset and generate following DHP19EPC.
Folder Hierarchy
Your work space will look like this(note to change the data path in the codes to your own path):
├── DHP19EPC_dataset # Store test/train data
| ├─ ... # MeanLabel and LastLabel
├── EventPointPose # This repository
| ├─ checkpoints # Checkpoints and debug images
| ├─ dataset # Dataset
| ├─ DHP19EPC # To generate data for DHP19EPC_dataset
| ├─ evaluate # Evaluate model and save gif/mp4
| ├─ logs # Training logs
| ├─ models # Models
| ├─ P_matrices # Matrices in DHP19
| ├─ results # Store results or our pretrained models
| ├─ srcimg # Source images
| ├─ tools # Utility functions
| ├─ main.py # train/eval model
Train model
cd ./EventPointPose
# train MeanLabel
python main.py --train_batch_size=16 --epochs=30 --num_points=2048 --model PointNet --name PointNet-2048 --cuda_num 0
# train LastLabel
python main.py --train_batch_size=16 --epochs=30 --num_points=2048 --model PointNet --name PointNet-2048-last --cuda_num 0 --label last
Evaluate model
You can evaluate your model and output gif as well as videos following this doc.
Pretrained Model
Our pretrained model in the paper can be found here: Baidu Cloud or Google Drive They can also be found in the Github Releases tab.
Publication
If you find our project helpful in your research, please cite with:
@inproceedings{chen2022EPP,
title={Efficient Human Pose Estimation via 3D Event Point Cloud},
author={Chen, Jiaan and Shi, Hao and Ye, Yaozu and Yang, Kailun and Sun, Lei and Wang, Kaiwei},
booktitle={2022 International Conference on 3D Vision (3DV)},
year={2022}
}
For any questions, welcome to e-mail us: chenjiaan@zju.edu.cn, haoshi@zju.edu.cn, and we will try our best to help you. =)
Acknowledgement
Thanks for these repositories: