
OpenaAI Gym Shadow Dexterous Hand robot environment based on PyBullet.
Successor of the old Shadow Dexterous Hand robot gym environment.
git clone https://github.com/szahlner/shadowhand-gym.git
pip install -e shadowhand-gymimport gym
import shadowhand_gym
env = gym.make('ShadowHandReach-v1', render=True)
obs = env.reset()
done = False
while not done:
# Random action
action = env.action_space.sample()
obs, reward, done, info = env.step(action)
env.close()ShadowHandReach-v1 easy |
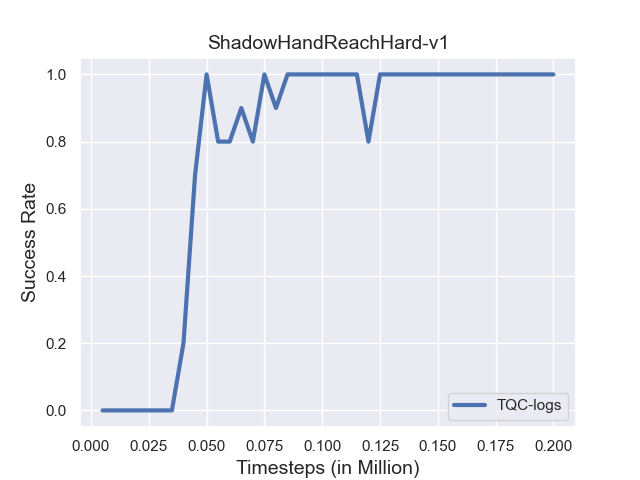
ShadowHandReach-v1 hard |
 |
 |
ShadowHandBlock-v1 orientation only |
|
 |
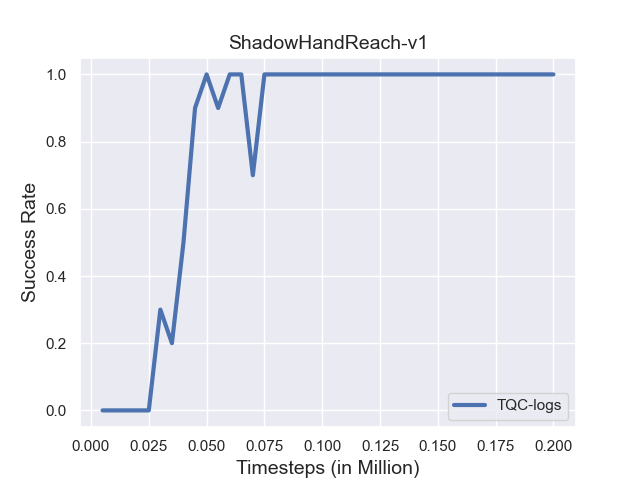
Baseline results trained with rl-baselines3-zoo.
ShadowHandReach-v1 easy |
ShadowHandReach-v1 hard |
 |
 |
ShadowHandBlock-v1 orientation only |
|
| Work in progress... |
Environments are widely inspired from OpenAI ShadowHand environments.
Code is inspired from qgallouedec's panda-gym.
Robot base URDF file from Tadinu's my_arm.