This is the implementation of the paper:
Path Planning Based on Mixed Algorithm of RRT and Artificial Potential Field Method by Shunyu Huang
Paper
The algorithm proposed in this paper was based on RRT and RRT* of target bias probability combined with artificial potential field method.
| RRT | RRT star | RRT + APF | RRT star + APF |
|---|---|---|---|
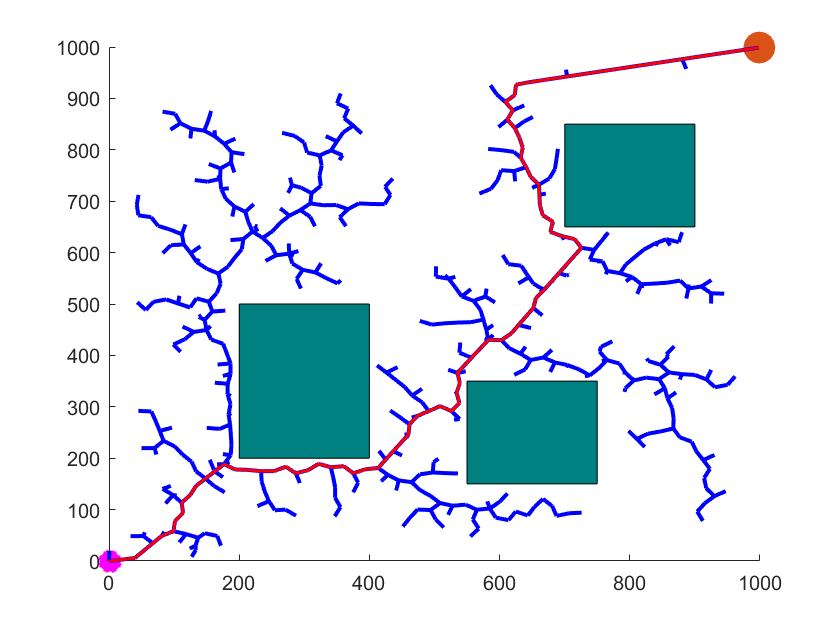 |
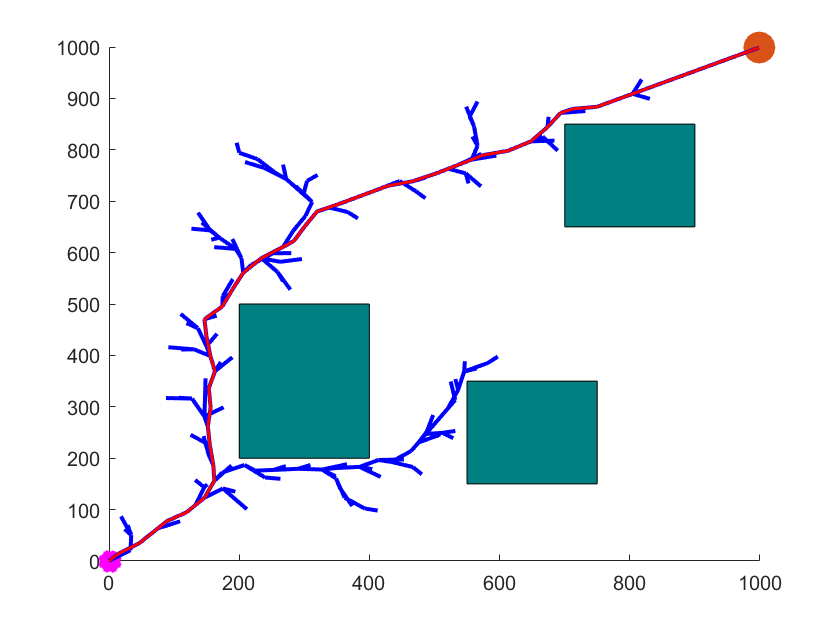 |
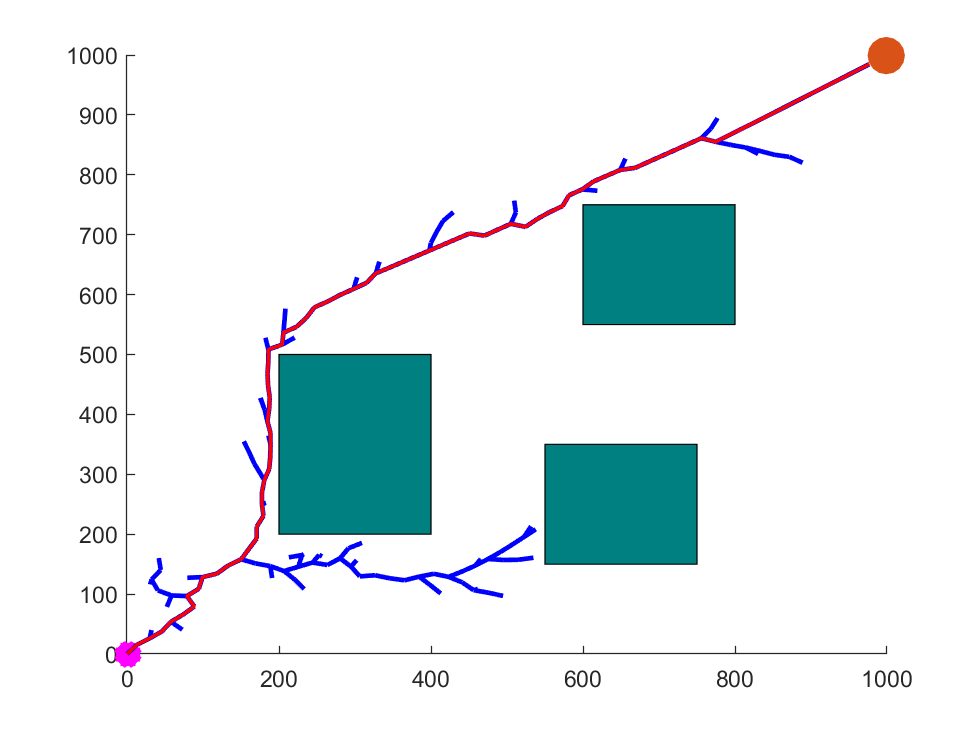 |
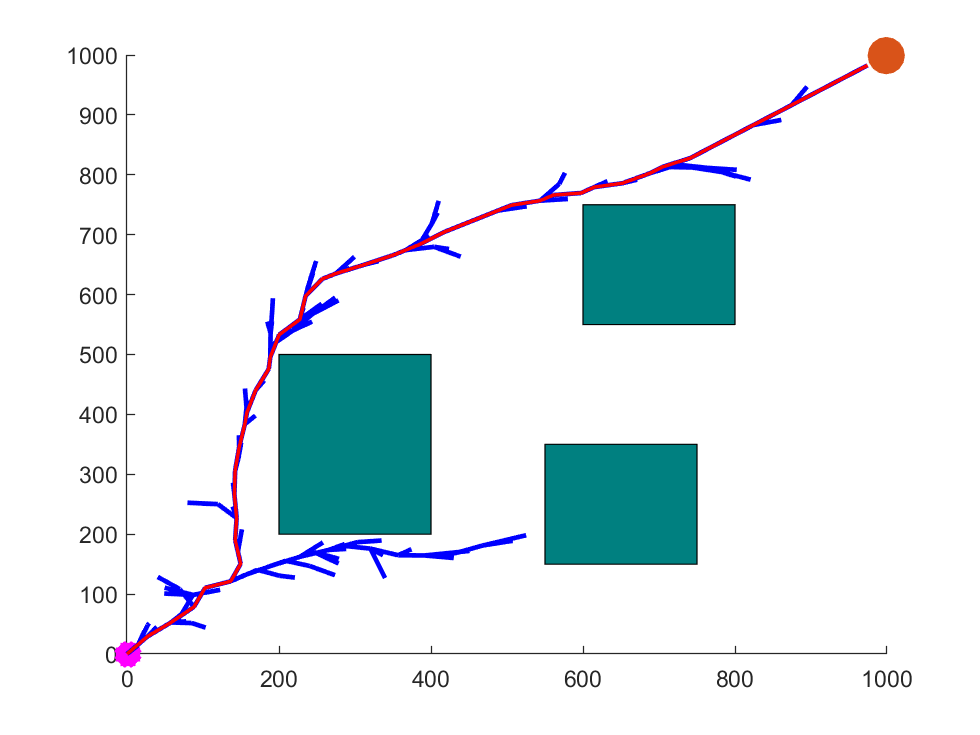 |
Feel free to cite the package, if you find it useful for your research.
@INPROCEEDINGS{9570910,
author={Huang, Shunyu},
booktitle={2021 4th International Conference on Intelligent Robotics and Control Engineering (IRCE)},
title={Path Planning Based on Mixed Algorithm of RRT and Artificial Potential Field Method},
year={2021},
volume={},
number={},
pages={149-155},
doi={10.1109/IRCE53649.2021.9570910}}