ChArUco pose estimation using OpenCV
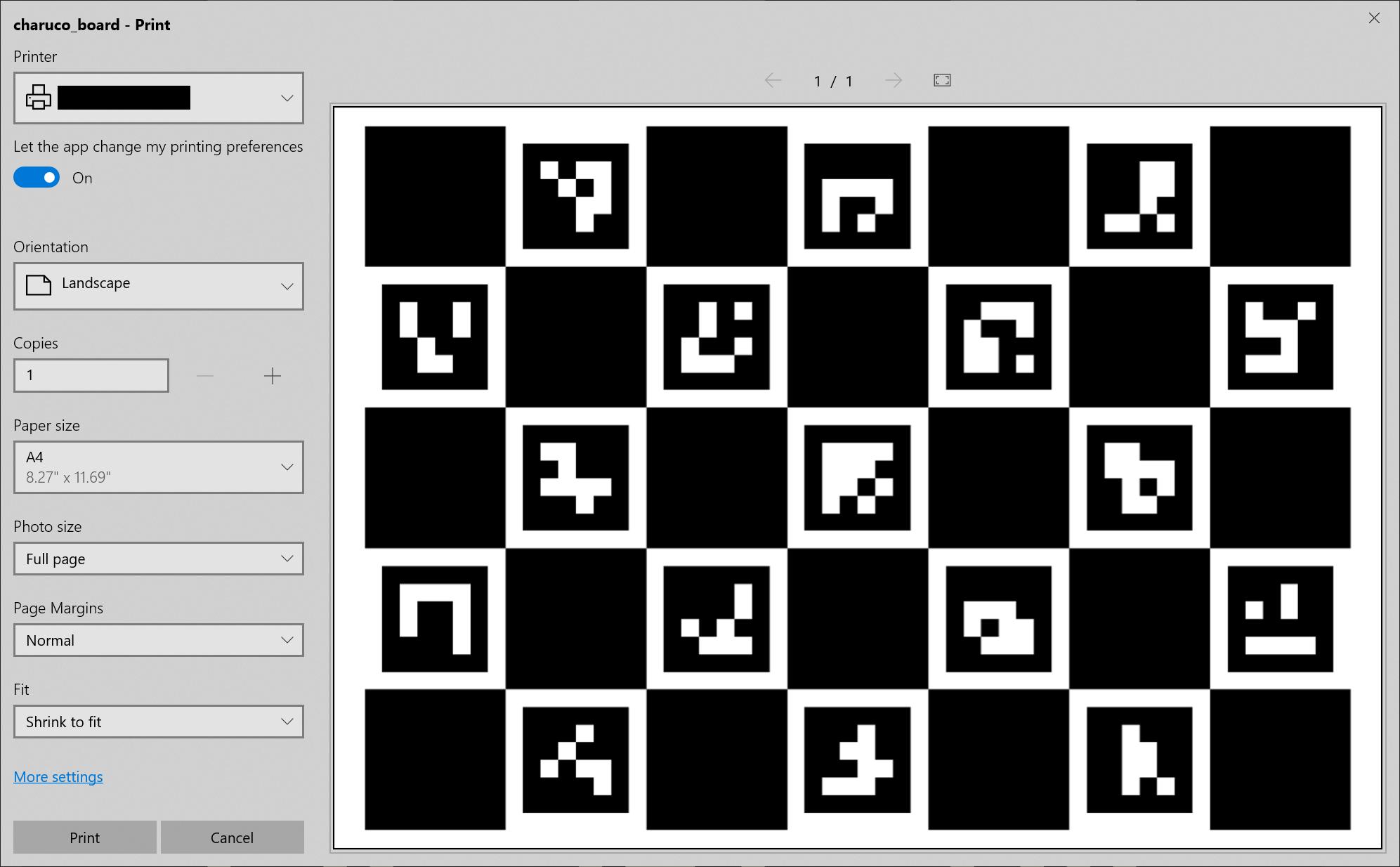
- Print out charuco_board.png and take a picture of it, name the picture image.png. Make sure not to accidentally stretch the image during print.
- Measure the actual square length and marker length of the printout, and change it in the code respectively
- Create intrinsic.txt with camera intrinsic matrix
- Upload image.png and intrinsic.txt to the current directory at the "Files" bar on the left
- Click "Runtime" and "Run all" and see the output file charuco_tf.txt and camera_tf.txt in the current directory
Create ChArUco

Detect markers

Detect ChArUco

Projection

-
Uncheck
Fit picture to frame: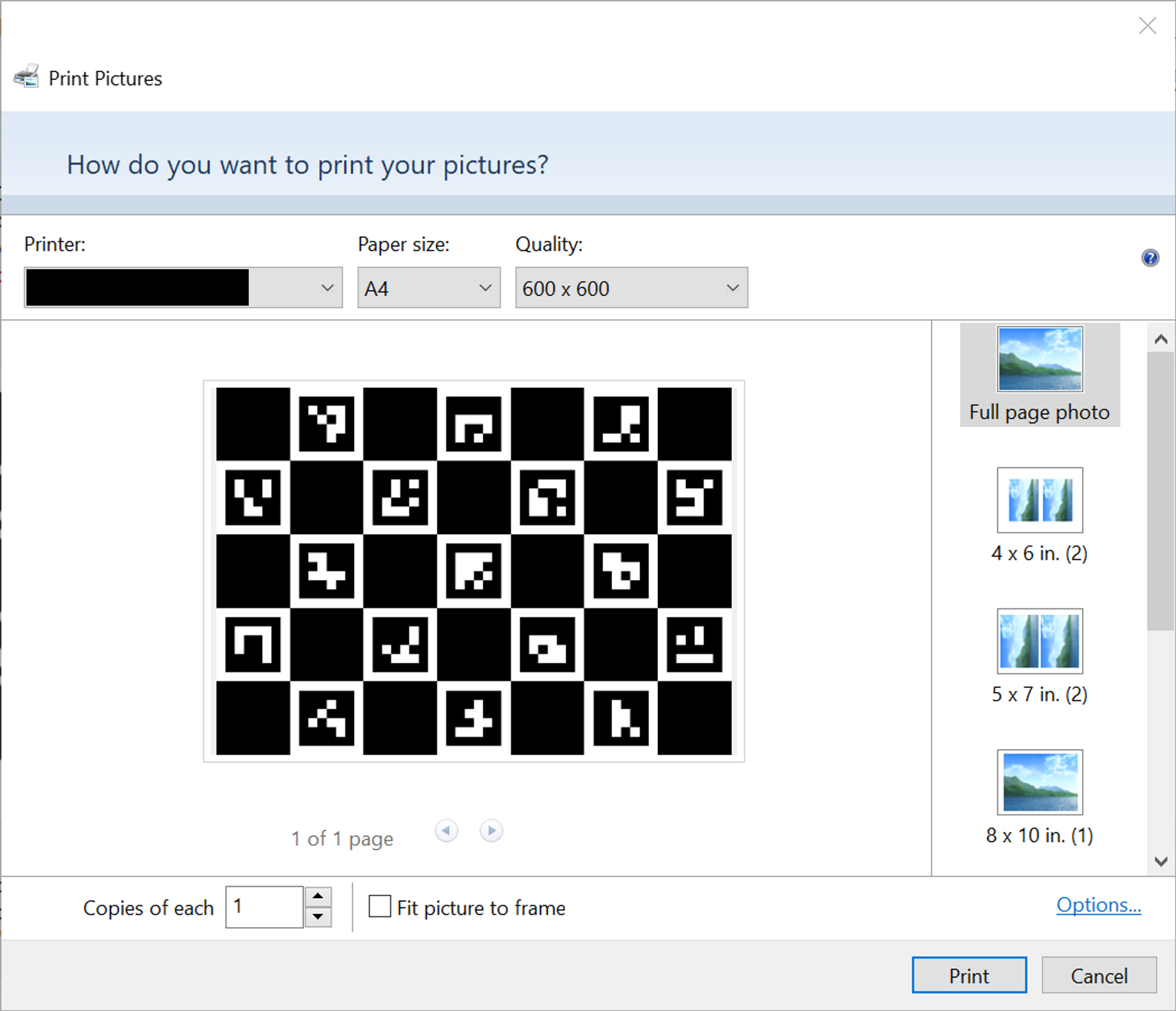
-
Select
Shrink to Fit: