Now able to establish connection between KR_C4 and ROS.
ranjitkathiriya opened this issue · comments

Hey there,
I am trying to establish a connection between the RSI interface and KUKA KR_20 R1810-2, a KR_C4 controller.
Up till now, I have followed below instructions:
I have set the Ip Address is shown below:
Smart-pad Ip address:
Windows 10 OS in a smart pad: 192.168.0.1
Not changed, and not safe to do so.
Smartpad virtual5 KLI: 172.31.1.147
Virtual 6: 192.168.1.121
Windows interface is selected.
Virtual 7 RSI: 192.168.2.121
Linux PC:
192.168.1.210 windows interface
192.168.2.210 RSI
Selecting User as Administrator in the smart pad and after Minimize HMI (Start-up > Service > Minimize HMI), I window 10 of smart pad I can ping to 192.168.1.121, 192.168.2.121, and 192.168.1.210, but I am not able to ping 192.168.2.210. On the other side, I can ping all the smart-pad addresses, e.g. (172.31.1.147, 192.168.1.121, 192.168.2.121 ).
In ros_rsi_ethernet.xml, I have tried adding both IP addresses of my Linux pc 192.168.2.210 and 192.169.1.210.
In test_params.yml, I have changed the IP address to 192.168.1.210. Further, I have added the below line just before kuks_hardware_interface.
<arg name="model" default="$(find kuka_kr16_support)/urdf/kr16_2.xacro"/>
<param name="robot_description" command="$(find xacro)/xacro $(arg model)" />
This is the output I am getting :
kuka-ai@kukaai-ROG-Zephyrus-G15-GA502IU-GA502IU:~/ws_moveit$ roslaunch kuka_rsi_hw_interface test_hardware_interface.launch sim:=false
... logging to /home/kuka-ai/.ros/log/63f99866-7771-11eb-bd0a-efc131f6c940/roslaunch-kukaai-ROG-Zephyrus-G15-GA502IU-GA502IU-8082.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://kukaai-ROG-Zephyrus-G15-GA502IU-GA502IU:40857/
SUMMARY
========
PARAMETERS
* /controller_joint_names: ['joint_a1', 'joi...
* /joint_state_controller/publish_rate: 50
* /joint_state_controller/type: joint_state_contr...
* /position_trajectory_controller/action_monitor_rate: 20
* /position_trajectory_controller/joints: ['joint_a1', 'joi...
* /position_trajectory_controller/state_publish_rate: 50
* /position_trajectory_controller/type: position_controll...
* /robot_description: <?xml version="1....
* /rosdistro: noetic
* /rosversion: 1.15.9
* /rsi/listen_address: 192.168.1.210
* /rsi/listen_port: 49152
NODES
/
controller_spawner (controller_manager/spawner)
kuka_hardware_interface (kuka_rsi_hw_interface/kuka_hardware_interface_node)
robot_state_publisher (robot_state_publisher/robot_state_publisher)
ROS_MASTER_URI=http://localhost:11311
process[kuka_hardware_interface-1]: started with pid [8098]
process[controller_spawner-2]: started with pid [8099]
[ INFO] [1614265728.636066787]: Starting hardware interface...
process[robot_state_publisher-3]: started with pid [8101]
[ INFO] [1614265728.647552308]: Loaded kuka_rsi_hardware_interface
[ INFO] [1614265728.650771039]: Setting up RSI server on: (192.168.1.210, 49152)
[ INFO] [1614265728.675373482]: Waiting for robot!
[WARN] [1614265728.882024]: DEPRECATION warning: --shutdown-timeout has no effect.
[INFO] [1614265728.883432]: Controller Spawner: Waiting for service controller_manager/load_controller
[INFO] [1614265728.887354]: Controller Spawner: Waiting for service controller_manager/switch_controller
[INFO] [1614265728.891932]: Controller Spawner: Waiting for service controller_manager/unload_controller
[INFO] [1614265728.896652]: Loading controller: position_trajectory_controller
[INFO] [1614265728.924515]: Loading controller: joint_state_controller
[INFO] [1614265728.929037]: Controller Spawner: Loaded controllers: position_trajectory_controller, joint_state_controller
On the controller side I am getting this error:

My configuration is correct?
And why am I not able to communicate?
Thanks in advance for your help.

On a first glance your RSI listening address is set wrong in ROS:
/rsi/listen_address: 192.168.1.210
Shouldn't this be 2.210?
Thanks, @destogl,
for replying to my answer and I have tried with both IP addresses but I am not able to solve.
I did all things from the scratch again, and I found few points, but I am confused that it a true or wrong.
- Whenever I am running my program:
I see this type of behavior: First, it will execute PTP {A1 0, A2 -90, A3 90, A4 0, A5 90, A6 0} this line, and release the play button and play it again then my cursor stops here in HALT. I have checked my file is in the proper location, and I think that this condition is not satisfying
ret = RSI_CREATE("ros_rsi.rsi",CONTID,TRUE)
IF (ret <> RSIOK) THEN
HALT # Over here
ENDIF
I have checked the value of ret from smart-pad and I get below value.

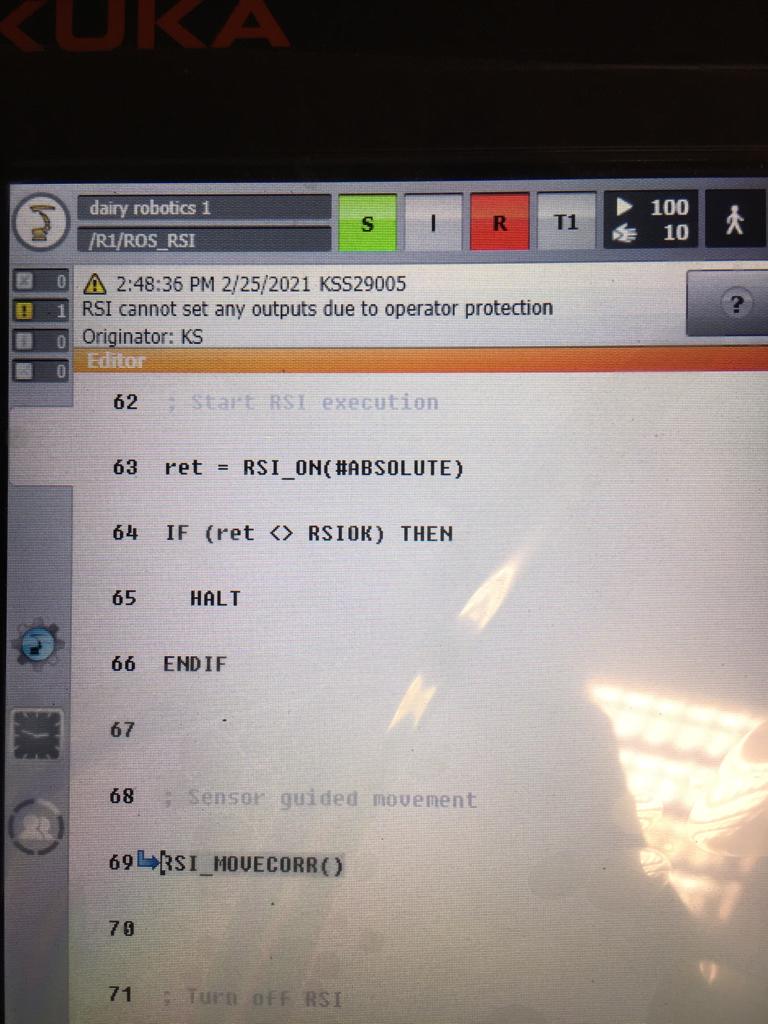
- After Halt when I press the play button again, I am getting two warnings:
A. RSI: cannot set any outputs due to operator protection
Originator:KS
(Do we have to turn some operator flag on for this?)
B. RSI_MOVECORR: Motion active
Originator:0
And in Auto mode: all things up till now remain the same but I get this extra warning.
C. Process active
KSS01372
Thanks for helping
It is a controller problem because it was not able to find ros_rsi.rsi file so the controller was giving a flag of 27. I am giving all flags list that can be helpful to others.
This file is there in your controller or smart pad as an RSI.DAT
GLOBAL CONST INT RSIOK=0
GLOBAL CONST INT RSIBAD=1
GLOBAL CONST INT RSIINVARG=2
GLOBAL CONST INT RSINOTIMPL=3
GLOBAL CONST INT RSINOMEMORY=4
GLOBAL CONST INT RSIINVCONT=5
GLOBAL CONST INT RSIINVFILE=6
GLOBAL CONST INT RSIINVPARAMID=7
GLOBAL CONST INT RSIINVPARAM=8
GLOBAL CONST INT RSIINVOBJID=9
GLOBAL CONST INT RSIINVINPIDX=10
GLOBAL CONST INT RSIINVOUTIDX=11
GLOBAL CONST INT RSIHASSUCC=12
GLOBAL CONST INT RSILNKINPOBJID=13
GLOBAL CONST INT RSILNKOUTOBJID=14
GLOBAL CONST INT RSILNKINPIDX=15
GLOBAL CONST INT RSILNKOUTIDX=16
GLOBAL CONST INT RSILNKOCCUP=17
GLOBAL CONST INT RSILNKSIGNAL=18
GLOBAL CONST INT RSINOLNKOBJ=19
GLOBAL CONST INT RSILNKCIRCLE=20
GLOBAL CONST INT RSILNKMAXDEP=21
GLOBAL CONST INT RSINOTLINKED=22
GLOBAL CONST INT RSILNKNEEDED=23
GLOBAL CONST INT RSILNKOUTDISABLED=24
GLOBAL CONST INT RSIDISPREDECESSOR=25
GLOBAL CONST INT RSIMAXENAOBJ=26
GLOBAL CONST INT RSIFILENOTFOUND=27
GLOBAL CONST INT RSIENASUCCESSOR=28
GLOBAL CONST INT RSIBADCAST=29
GLOBAL CONST INT RSIALREADYON=30
GLOBAL CONST INT RSINOTRUNNING=31
GLOBAL CONST INT RSIEXTLIBNOTFOUND=32
GLOBAL CONST INT RSINOCONNECT=33
GLOBAL CONST INT RSITIMEOUT=34
GLOBAL CONST INT RSIUSERERR=100
GLOBAL CONST INT RSITSYS=998
GLOBAL CONST INT RSISPOC=999

It is a controller problem because it was not able to find ros_rsi.rsi file so the controller was giving a flag of 27
but aren't you supposed to copy that file to the controller as part of the setup procedure?
copy that file to the controller as part of the setup procedure?
Yes, I did that, but then also I was getting flag 27. After I asked my friend to test in his robot and got a flag of 0, I think this was my controller issue.
I think a factory reset will help me to solve this issue.
I am attaching a screenshot of my friend's robot. He is getting the flag 0, RSI OK signal.
Note: code altered to check the flags of RSI on tech pad.

Hello @gavanderhoorn , @destogl ,
This issue is this files ros_rsi.rsi.diagram, ros_rsi.rsi, ros_rsi.rsi.xml is written for the old version of RSI which is 3 and below. I am creating the files for the newer version RSI 4+ files for krl -> C4 and will make a pull request.