PointRCNN
Warning: This is not the official implementation of PointRCNN, and it is still in progress.
Introduction
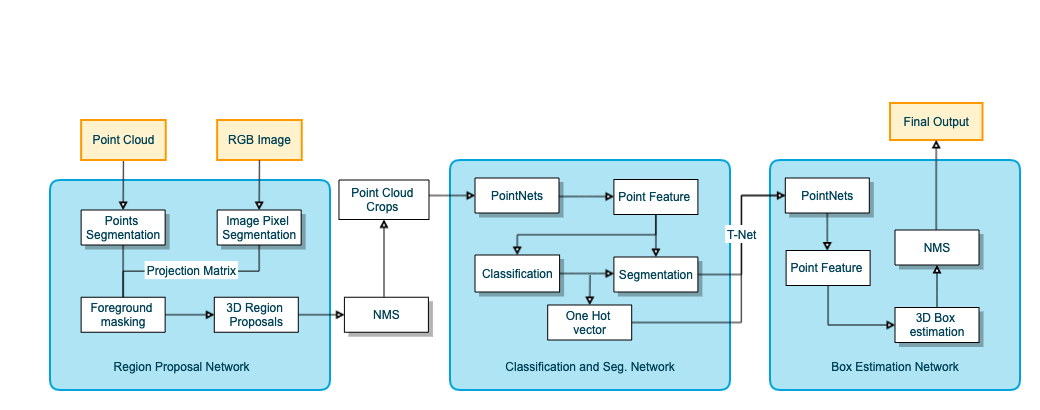
A 3D object detector that takes point cloud and RGB image(optional) as input.
Architecture
- Perform foreground point segmentation on the whole point cloud
- Output a 3D proposal box for every foreground point
- Crop point cloud with proposal boxes and feed into the 2nd-stage classification and box refinement network

Evaluation
Recall of RPN
| Method | Avg. Recall(IOU>0.5) |
|---|---|
| Point Only | 81% |
| Point+Image | 86% |
Final detection mAP
| Class | 3D mAP(Easy, Moderate, Hard) | BEV mAP(Easy, Moderate, Hard) |
|---|---|---|
| Car | 62.179321, 57.947697, 60.453468 | 81.649628, 75.761436, 76.957726 |
| Pedestrain | 59.891392, 61.954231, 54.722935 | 73.589073, 67.023071, 67.218903 |
| Cyclist | 69.380432, 51.198471, 43.347675 | 71.138779, 52.781166, 44.486042 |
Results


Todo List
- Use segmentation result from RPN to help ROI pooling
- Use dense points obtained from depth completion/stereo for 2nd-stage network