Code for "Overhead the Albatross Hangs Motionless Upon the Air with Dynamic Soaring"
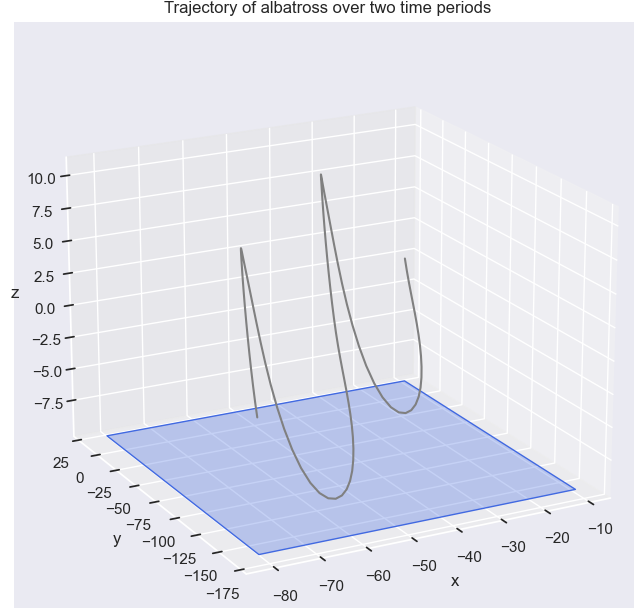
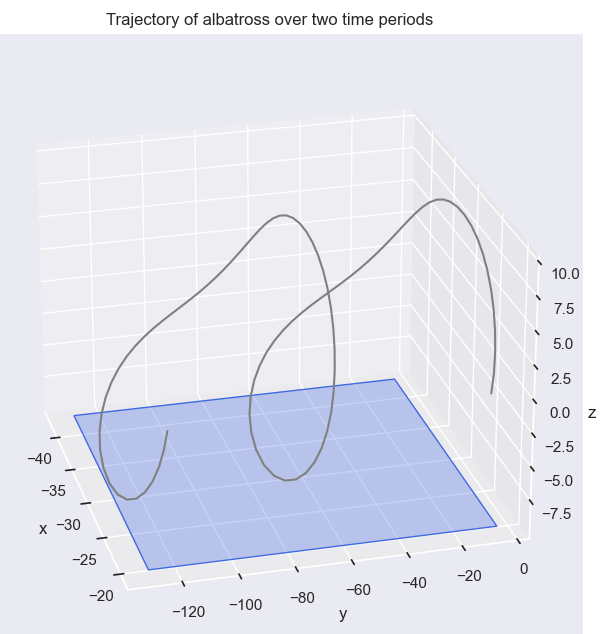
Simulation of trajectory optimisation for flight strategies used by albatrosses to achieve zero energy consumption long-flight trajectories along with trajectory stabilisation with LQR to account for noise and errors in dynamics.
Refer the paper for more details.
Final Video Presentation
Done as a course project for the 6.832 Underactuated Robotics Spring 2021 course by Russ Tedrake at MIT.