

Affordance Learning from Play for Sample-Efficient Policy Learning
Jessica Borja, Oier Mees, Gabriel Kalweit, Lukas Hermann, Joschka Boedecker, Wolfram Burgard
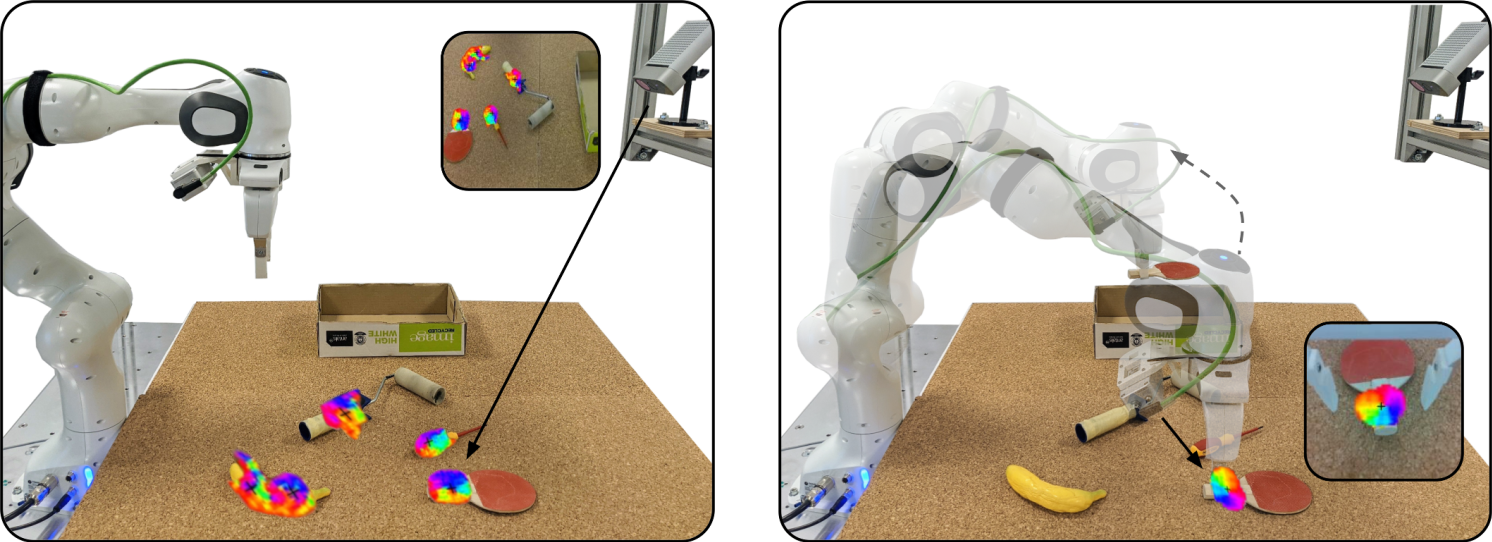
We present Visual Affordance-guided Policy Optimization (VAPO), a novel approach that extracts a selfsupervised visual affordance model from human teleoperated play data and leverages it to enable efficient policy learning and motion planning. We combine model-based planning with model-free deep reinforcement learning (RL) to learn policies that favor the same object regions favored by people, while requiring minimal robot interactions with the environment. We find that our policies train 4x faster than the baselines and generalize better to novel objects because our visual affordance model can anticipate their affordance regions. More information at our project page.
Here we show how to install vapo on your local machine. Alternatively you can install using Docker.
The installer is set to download pytorch 1.11 with cuda 11.3 by default. To correctly install the voting layer the cudatoolkit version installed with pytorch must match your systems CUDA version, which can be verified with nvcc --version command. Please modify the pytorch cudatoolkit of the environment accordingly. For more details please refer to local installation.
git clone https://github.com/mees/vapo.git
export VAPO_ROOT=$(pwd)/vapo
cd $VAPO_ROOT
conda create -n vapo_env python=3.8
conda activate vapo_env
sh install.sh
To install the voting layer first install Eigen.
git clone https://gitlab.com/libeigen/eigen.git
cd eigen/
mkdir build/
cd build/
cmake ..
sudo make install
Go to the directory of the voting layer and run setup.py. If you do not have sudo privileges, don't run sudo make install instead change the diretory in "include_dirs" to match where the eigen repo was downloaded, then run:
cd $VAPO_ROOT/vapo/affordance/hough_voting/
python setup.py install
A quick tutorial on evaluating a pre-trained policy on the unseen dataset.
If you want to use the trained affordance models or policies, you can download them using the script in trained_models
cd VAPO_ROOT/trained_models
bash download_model_weights.sh
We show how to run the evaluation for the policy on the unseen objets. For more details on running the policy please refer to Policy
The default configuration is set to run with the parameters of VAPO
python ./scripts/eval_tabletop.py scene=tabletop_random_unseen_15objs
python ./scripts/eval_tabletop.py scene=tabletop_random_unseen_15objs test.folder_name=./trained_models/policy/tabletop/baseline
A single NVIDIA GPU with 8GB memory should be sufficient for training and evaluation.
Tested with:
- GPU - Nvidia RTX 2080 Ti
- CPU - AMD EPYC 7502
- RAM - 64GB
- OS - Ubuntu 20.04.4
We show how to train a model from scratch assuming access to the play data.
- Download the playdata
- Discover affordances in the playdata to create a dataset.
- Train the affordance model for both the static and gripper camera.
- Train the policy using the previously trained affordance models.
- Evaluation.
We provide the playdata used for both simulation and the real world experiments.
-
Simulation data (37.7 GB)
cd VAPO_ROOT/datasets/playdata bash download_playdata_simulation.sh -
Real world data (57.6 GB)
cd VAPO_ROOT/datasets/playdata bash download_playdata_real_world.sh
Before training a model we first need to process the data to discover the affordances from the playdata. To do so we need to the create_dataset.py script.
If unspecified we assume the dataset will be stored in a folder named "datasets" in the VAPO_ROOT parent directory. This can be modified in cfg_datacollection.yaml.
If you want to visualize the discovered affordances while is being created, add the flag viz=True
For the simulation playdata run from VAPO_ROOT:
python ./scripts/create_dataset.py dataset_name=simulation
For the real world playdata run from VAPO_ROOT:
python ./scripts/create_dataset.py dataset_name=real_world
This will create a dataset at VAPO_ROOT/datasets/dataset_name which can be used to train the affordance model.
Here we show a small summary on how to train the affordance model. For a more detailed explanation on the available options please refer to the affordance model documentation
We use wandb to log out results. By default it is set to offline under the configuration file cfg_affordance. Before training anything please log into your wandb and change the values of wandb_login in the previous file.
The training script uses the configuration defined in cfg_affordance.
To train the affordance models you can run the following:
python ./scripts/train_affordance.py model_name=aff_gripper dataset.cam=gripper dataset_name=DATASET_NAME
python ./scripts/train_affordance.py model_name=aff_static dataset.cam=static dataset_name=DATASET_NAME
This will create an output at hydra_outputs/affordance_model/date/time. Alternatively you can specify were you want the model output by adding the flag hydra.run.dir=CAM_AFF_OUT_FOLDER
After training the affordance model you can try training a policy and load the desired affordance model. All the saved affordance models, go to the hydra output directory. Here we load the model with the best mIoU as an example
python ./scripts/train_tabletop.py \
gripper_cam_aff_path=GRIPPER_AFF_OUT_FOLDER/trained_models/best_val_miou.ckpt \
static_cam_aff_path=STATIC_AFF_OUT_FOLDER/trained_models/best_val_miou.ckpt
python ./scripts/train_tabletop.py \
gripper_cam_aff_path=GRIPPER_AFF_OUT_FOLDER/trained_models/best_val_miou.ckpt \
static_cam_aff_path=STATIC_AFF_OUT_FOLDER/trained_models/best_val_miou.ckpt \
affordance.gripper_cam.use_distance=False \
affordance.gripper_cam.use=False \
affordance.gripper_cam.densify_reward=False
This will create an output to hydra_outputs/pickup/date/time.
Alternatively you can define where to ouput the models using the flag hydra.run.dir=POLICY_TRAIN_FOLDER.
The evaluation script loads the parameters used for training by default.
For this you need to provide the folder that is outputed as a result of training (POLICY_TRAIN_FOLDER).
Additionally, we save different checkpoints. These can be found under POLICY_TRAIN_FOLDER/trained_models.
For this example we load the model with the most successful grasp on the all-objects evaluation
python ./scripts/eval_tabletop.py \
test.model_name=most_tasks_from_15 \
test.folder_name=POLICY_TRAIN_FOLDER
To test on a different scene you can add the flag scene=DESIRED_SCENE where DESIRED_SCENE is a yaml file name under ./config/scene.
For instance, to run the evaluation on the unseen objects run:
python ./scripts/eval_tabletop.py \
test.model_name=most_tasks_from_15 \
test.folder_name=POLICY_TRAIN_FOLDER \
scene=tabletop_random_unseen_15objs
For more details on using the policy please refer to the policy documentation
If you find the dataset or code useful, please cite:
@inproceedings{borja22icra,
author = {Jessica Borja-Diaz and Oier Mees and Gabriel Kalweit and Lukas Hermann and Joschka Boedecker and Wolfram Burgard},
title = {Affordance Learning from Play for Sample-Efficient Policy Learning},
booktitle = {Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)},
year = 2022,
address = {Philadelphia, USA}
}
MIT License