

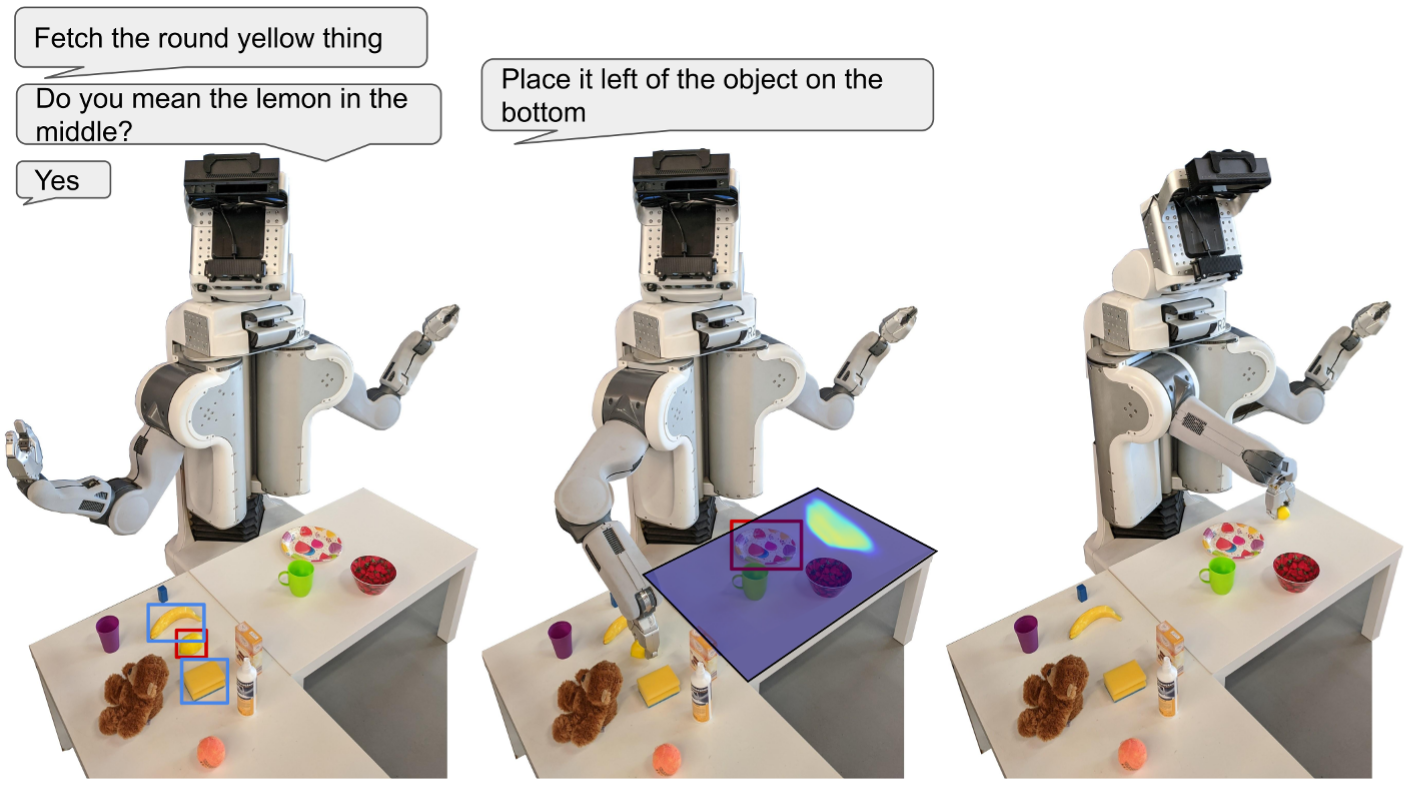
This repository contains an Alexa skill to control and interact with a robot via ROS topics. Concretely, the current skill implementation was used for picking-and-placing tabletops objects from natural language. More information at the project page.
If you find the code helpful please consider citing our work
@inproceedings{mees21iser,
author = {Oier Mees and Wolfram Burgard},
title = {Composing Pick-and-Place Tasks By Grounding Language},
booktitle = {Proceedings of the International Symposium on Experimental Robotics (ISER)},
year = 2021,
address = {La Valletta, Malta}
}
@inproceedings{mees20icra_placements,
author = {Oier Mees and Alp Emek and Johan Vertens and Wolfram Burgard},
title = {Learning Object Placements For Relational Instructions by Hallucinating Scene Representations},
booktitle = {Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)},
year = 2020,
address = {Paris, France}
}
First, launch rosbridge_server:
roslaunch rosbridge_server rosbridge_websocket.launch
In a separate shell, make your local port visible for the VM
ssh -R 9090:localhost:9090 aisalexa /opt/aisalexa/forward_port.sh
In case your local server does not run on port 9090, replace the first port number only.
There will be three ros topics: /alexa/command, alexa/debug and alexa/reply. See
test_response.py for examplary handling of commands.
Start all containers
cd /opt/aisalexa/nginxsudo ./start.sh
Show container logs
cd /opt/aisalexa/nginxsudo docker-compose logs aisalexa(leave out the service name to get the logs of all services)
see Setup
For configuration, change the environment variables in nginx/.env.
Update configuration by using git pull. When running start.sh,
updated images (i.e., the updated skill) are retrieved automatically.
Remember that changes to the skill must be pushed to aisgit for
the updated docker container to be built
For academic usage, the code is released under the GPLv3 license. For any commercial purpose, please contact the authors.
This code was developed by Henrich Kohlkhorst and Oier Mees at the University of Freiburg, Germany.