The ROS 2 node for motor controller of wheeled mobile robots. More details about the device could be found here.
The node allows to communicate with the controller device. It publishes the odometry data, digital inputs states and subscribes velocity commands, digital outputs states.

The MD Drive device.
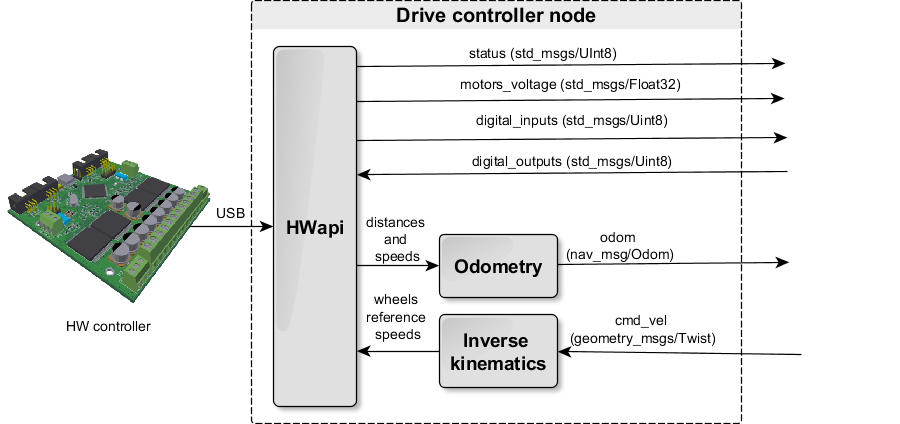
A structure of a ROS node.
- Install the
hidapilibrary that is used to handle USB communication. It could be done for example with APT on the Ubuntu system.
sudo apt install libhidapi-dev- Install from sources the MD Drive API package md_drive_api.
- Create ROS 2 workspace.
- Build:
colcon build
- ros2 launch md_drive_ros controller_launch.py
- ros2 run md_drive_ros md_drive_ros_exe
- Add full configuration of controller by parameters in yaml
- Add kinematics calculations
- Change watchdog to time period instead of ticks