- Author:Luxi Huang
- Skills: SLAM, Mapping, Sensor-data-analysis, ROS, C++
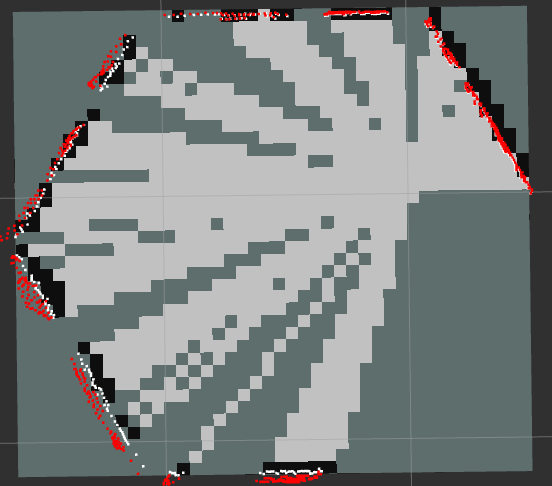
- This SLAM project is using whisker touching sensor to do object detection and map building.
- It implement Whisker Physics Simulator to get whisker sensor data.
- Then it transfer the whisker 3D sensor data to 2D laser scan data and implement with Slam_toolbox to build the map.
- This file initial
NodeHandleand createobject_detectionnode. It includesObjectDetectclass to convert whisker sensor data to 2D scan data and build the map.
- This is the Class Constructor for
ObjectDetect.
- Header file for the
ObjectDetectclass.
- The launch file include all node files for whisker sensor data detect objects and build mapping.
- It contains all whisker sensor data which got from Whisker Physics Simulator.
-
Clone the files and using wstool to download all related packages.
-
$ roslaunch whisker object_detect.launch -
$ roslaunch slam_toolbox offline.launch -
$ rostopic echo /scan -
open Rviz, change frame to map, and add map and other topics.