
image_view2 is an extended image_view.
Features
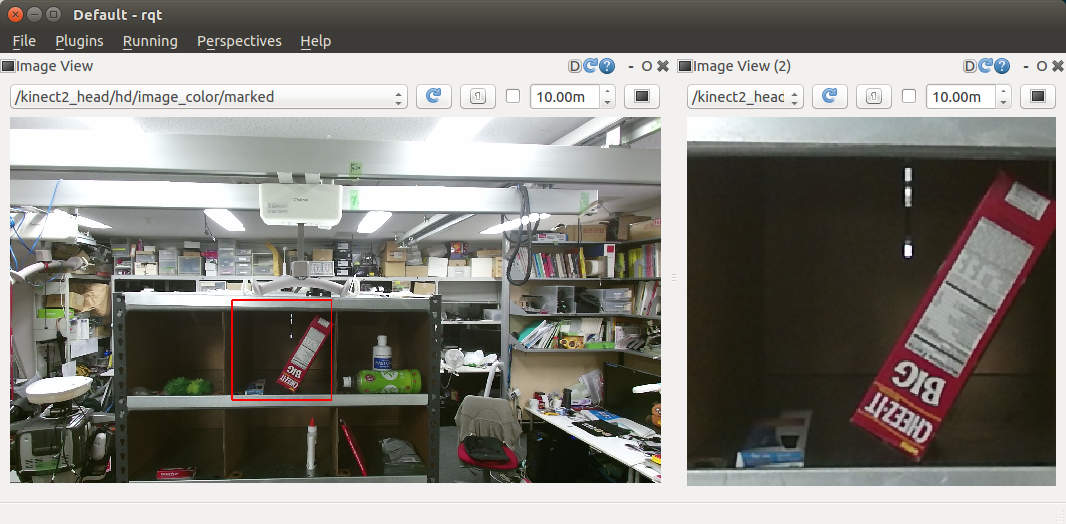
- Draw markers on image view
- Interact with user direction
image_view2 support several mode to interact with user.
You can set interaction mode by ~interaction_mode parameter or
change mode by service interfaces.
-
Rectangle mode (
~interaction_mode:=rectangle)In rectangle mode, user can select region-of-interest by dragging mouse pointer.
Selected regions are published to
image/screenrectangle(geometry_msgs/PolygonStamped) topic.If user clicks on the view instead of dragging pointer, clicked position is published to
image/screenpoint(geometry_msgs/PointStamped) topic. -
Line mode (
~interaction_mode:=line)In line mode, user can select a line by dragging mouse pointer.
Selected line are published to
image/line(geometry_msgs/PolygonStamped) topic. -
Polygon mode (
~interaction_mode:=poly)In polygon mode, user can select a series of closed lines. User can add line by left-click and close the lines by right-click.
Selected polygon are published to
image/poly(geometry_msgs/PolygonStamped) topic. -
Grabcut mode (
~interaction_mode:=grabcut)In grabcut mode, user can select two curves. By typing
Esckey, you can clear selected curves.
The selected first red curve is published to
image/foreground(sensor_msgs/Image) and the second green one is publiehd toimage/background(sensor_msgs/Image). This mode is originally implemented to select forground and background pixels for grabcut. -
Grabcut Rectangle mode (
~interaction_mode:=grabcut_rect)In grabcut rectangle mode, user can select two rectangles. By typing
Esckey, you can clear selected rectangles.
The selected first red rectangle is published to
image/foreground_rect(geometry_msgs/PolygonStamped) and the second green one is publiehd toimage/background_rect(geometry_msgs/PolygonStamped). This mode is originally implemented to select forground and background regions for grabcut.




-
image/marked(sensor_msgs/Image)Image with marks drawed.
-
image/screenrectangle_image(sensor_msgs/Image)Cropped image with user selection at Rectangle mode.

-
image(sensor_msgs/Image)Input image
-
camera_info(sensor_msgs/CameraInfo)CameraInfo of the image. camera info is required to compute projection matrix when drawing markers.
-
image_marker(image_view2/ImageMarker2)Marker topic.
-
image/event(image_view2/MouseEvent)Event interface. image_view2 can handle mouse events without gui interaction. This topic is used to emulate event handling via ros topics
-
~change_mode(image_view2/ChangeMode)Service interface to change interaction mode.
-
~rectangle_mode(std_srvs/Empty) -
~grabcut_mode(std_srvs/Empty) -
~grabcut_rect_mode(std_srvs/Empty) -
~line_mode(std_srvs/Empty) -
~poly_mode(std_srvs/Empty) -
~none_mode(std_srvs/Empty)Service interface to change interaction mode with
std_srvs/Emptyservice.
image_view2/ImageMarker2 is a message to draw on image_view2 canvas.
Definition is:
byte CIRCLE=0
byte LINE_STRIP=1
byte LINE_LIST=2
byte POLYGON=3
byte POINTS=4
byte FRAMES=5
byte TEXT=6
byte LINE_STRIP3D=7
byte LINE_LIST3D=8
byte POLYGON3D=9
byte POINTS3D=10
byte TEXT3D=11
byte CIRCLE3D=12
byte ADD=0
byte REMOVE=1
std_msgs/Header header
uint32 seq
time stamp
string frame_id
string ns
int32 id
int32 type
int32 action
geometry_msgs/Point position
float64 x
float64 y
float64 z
geometry_msgs/PointStamped position3D
std_msgs/Header header
uint32 seq
time stamp
string frame_id
geometry_msgs/Point point
float64 x
float64 y
float64 z
geometry_msgs/PoseStamped pose
std_msgs/Header header
uint32 seq
time stamp
string frame_id
geometry_msgs/Pose pose
geometry_msgs/Point position
float64 x
float64 y
float64 z
geometry_msgs/Quaternion orientation
float64 x
float64 y
float64 z
float64 w
float32 scale
float32 width
std_msgs/ColorRGBA outline_color
float32 r
float32 g
float32 b
float32 a
byte filled
std_msgs/ColorRGBA fill_color
float32 r
float32 g
float32 b
float32 a
duration lifetime
byte arc
float32 angle
geometry_msgs/Point[] points
float64 x
float64 y
float64 z
image_view2/PointArrayStamped points3D
std_msgs/Header header
uint32 seq
time stamp
string frame_id
geometry_msgs/Point[] points
float64 x
float64 y
float64 z
std_msgs/ColorRGBA[] outline_colors
float32 r
float32 g
float32 b
float32 a
string[] frames
string text
bool left_up_origin
bool ratio_scale