Static Walk of Humanoid Robot video

- install lib
sudo apt install liborocos-kdl1.3 ros-kinetic-effort-controllers ros-kinetic-position-controllers ros-kinetic-controller- sudo pip install pyexcel_ods - create workspace.
mkdir -p ~/uthai_ws/src - clone UTHAI-Common repository.
cd ~/uthai_ws/src git clone https://github.com/oeyyey/UTHAI-Humanoid.git - make.
cd ~/uthai_ws/ catkin_make - demo
source ~/uthai_ws/devel/setup.bash roslaunch uthai_simulation uthai_demo.launch
-
Click Start

-
- Use 2D Pose Estimate for initial start point
- Use 2D Nav goal for destination point

-
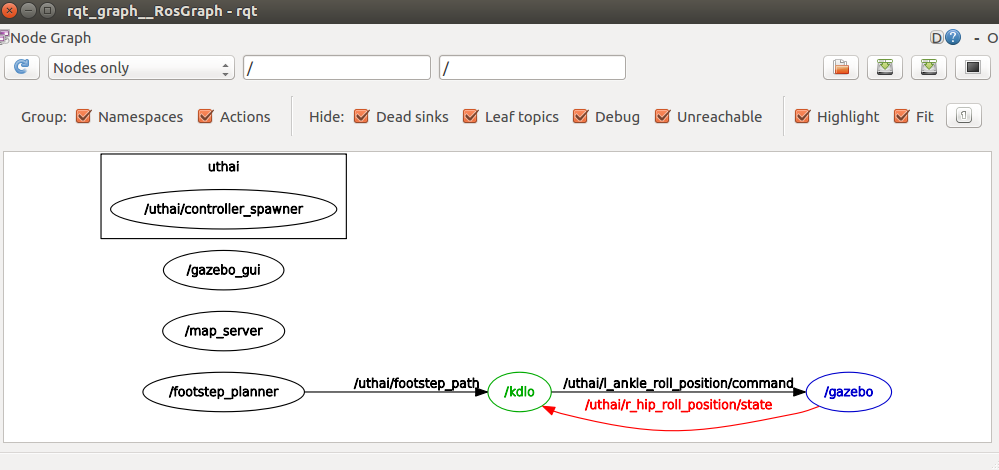
Wait a while for path searching

-
Robot's going to start walking (slowly)