uarm-pnp
==================
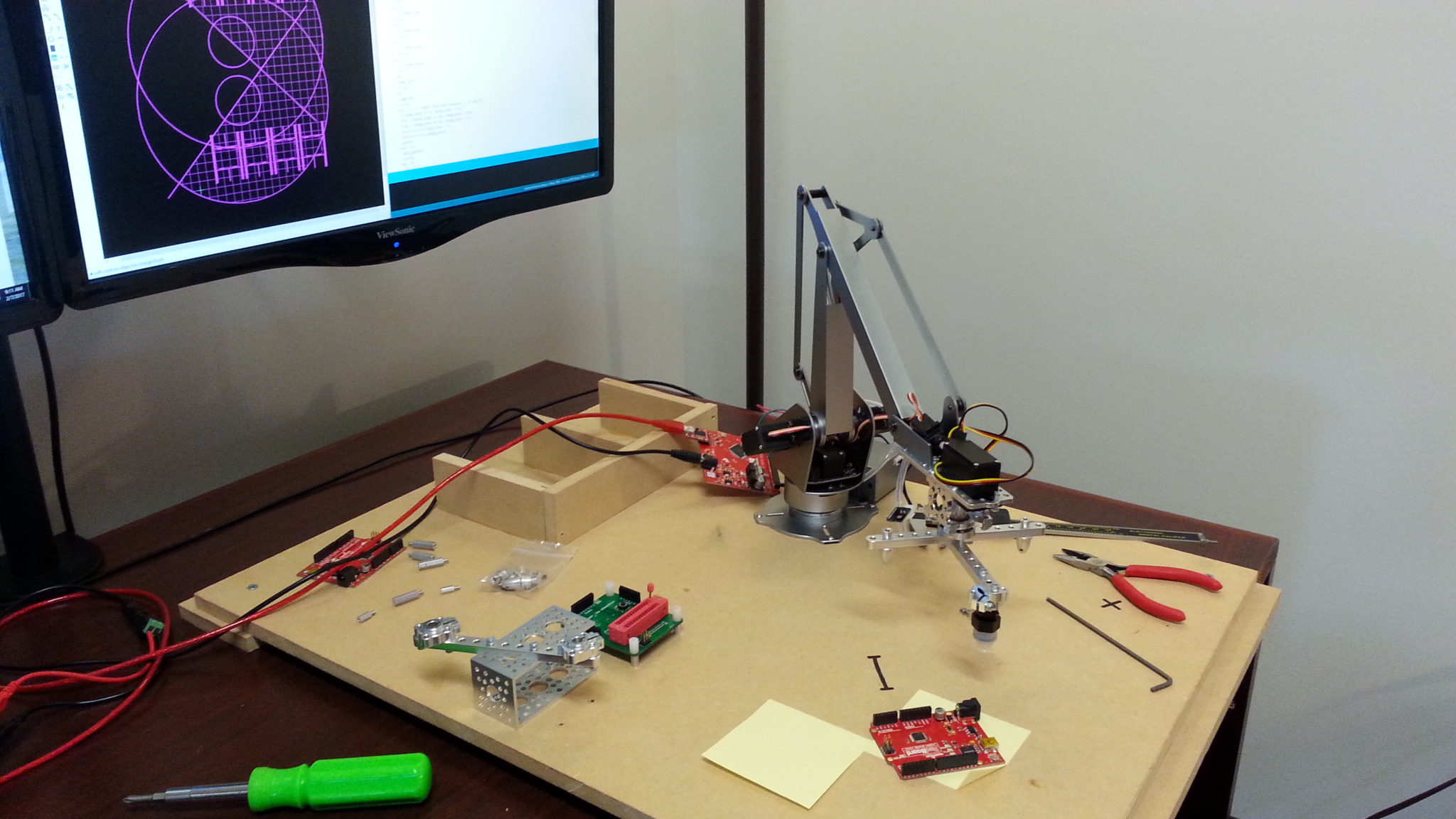
This is a DIY attempt at a Pick and place machine using a robotic arm and suction nozzle. It is intended to be used to pick up assembled circuit boards from a cartridge and place them onto a test jig (bed of nails style). Then after successful testing, place them back into another "good" cartridge. If boards to not pass testing, then they will be placed aside for rework.
Repository Contents
- /Arduino_Code - Arduino INO file used on the controller (a mega2560 based design). This communicates with the uArm, sending it commands to go to new locations, and listening for current location.
License Information
All contents of this repository are released under Creative Commons Share-alike 4.0.
Authors: Pete Lewis @ SparkFun Electonics