YabLoc was merged into Autoware on June 22, 2023. For more details, please refer to this PR. Future development will be conducted on autoware.universe.
If you would like to perform a standalone verification of YabLoc, the "Quick Start Demo" provided in this README is useful. If you are interested in running YabLoc as a localization method in Autoware, the sample data provided in this PR can be handy.
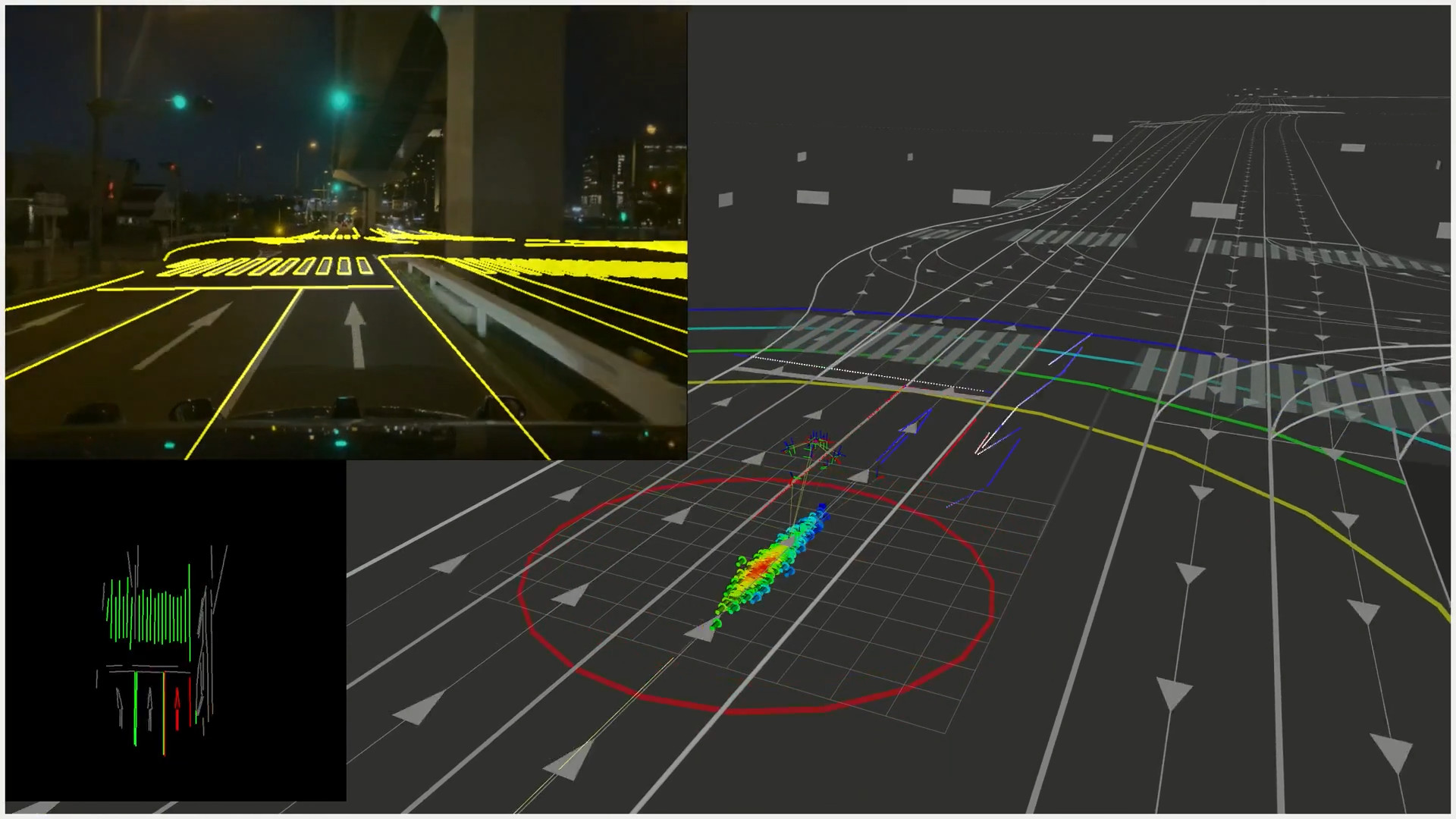
YabLoc is vision-baed localization with vector map. https://youtu.be/Eaf6r_BNFfk
Yabloc has been developed as a new localization stack for Autoware.
supporting Ubuntu 22.04 + ROS2 humble now.
NOTE: Currently, this software is assumed to be built in a separate workspace in order not to contaminate the autoware workspace. Someday this will be located in the workspace where Autoware blongs. The following submodules will be removed at the time.
- main is a branch to work with minimal dependence on autoware.
- If you want to try the YabLoc demo, please use
mainbranch.
- If you want to try the YabLoc demo, please use
- external/autoware_auto_msgs
- external/autoware_msgs
- external/septentrio_gnss_driver
- external/tier4_autoware_msgs
mkdir yabloc_ws/src -p
cd yabloc_ws
git clone git@github.com:tier4/YabLoc.git src/YabLoc --recursive
rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
source install/setup.bashThe author often use this build command
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release -DCMAKE_EXPORT_COMPILE_COMMANDS=ON -DCMAKE_C_COMPILER_LAUNCHER=ccache -DCMAKE_CXX_COMPILER_LAUNCHER=ccache --continue-on-error-
(optional) ccache
(--cmake-args) -DCMAKE_C_COMPILER_LAUNCHER=ccache -DCMAKE_CXX_COMPILER_LAUNCHER=ccache -
(optional) clang-tidy
(--cmake-args) -DCMAKE_EXPORT_COMPILE_COMMANDS=ON -
(optional) test
(--cmake-args) -DBUILD_TESTING=ON

- sample rosbag: Google Drive link
# terminal 1
source install/setup.bash
ros2 launch yabloc_launch sample.launch.xml
# terminal 2
source install/setup.bash
ros2 launch yabloc_launch rviz.launch.xml
# terminal 3
source install/setup.bash
ros2 bag play awsim_yabloc_rosbag_sample_0.db3 -s sqlite3If YabLoc runs successfully, you will see a screen like the following.

2D Pose Estimatein Rviz
You can inidcate x, y and yaw manually in rviz.
- GNSS Doppler initialization
If doppler (ublox_msgs/msg/navpvt) is available and the vehicle moves enough fast, YabLoc will estiamte the initial pose automatically.
UNDER CONSTRUCTION

click to more detail

from sesnors
| topic name | msg type | description |
|---|---|---|
/sensing/imu/tamagawa/imu_raw |
sensor_msgs/msg/Imu |
|
/sensing/camera/traffic_light/image_raw/compressed |
sensor_msgs/msg/CompressedImage |
|
/sensing/camera/traffic_light/camera_info |
sensor_msgs/msg/CameraInfo |
|
/sensing/gnss/ublox/navpvt |
ublox_msgs/msg/NavPVT |
If you use ublox |
/sensing/gnss/septentrio/poscovgeodetic |
septentrio_gnss_driver_msgs/msg/PosCovGeodetic |
If you use Septentrio |
/vehicle/status/velocity_status |
autoware_auto_vehicle_msgs/msg/VelocityReport |
from autoware
| topic name | msg type | description |
|---|---|---|
/tf_static |
tf2_msgs/msg/TFMessage |
published from sensor_kit |
/map/vector_map |
autoware_auto_mapping_msgs/msg/HADMapBin |
published from /map/lanelet2_map_loader |
click to open
Some nodes requires /tf_static from /base_link to the frame_id of /sensing/camera/traffic_light/image_raw/compressed (e.g. /traffic_light_left_camera/camera_optical_link).
You can verify that the tf_static is correct with the following command.
ros2 run tf2_ros tf2_echo base_link traffic_light_left_camera/camera_optical_linkIf the wrong /tf_static are broadcasted due to using a prototype vehicle, not having accurate calibration data, or some other unavoidable reason, it is useful to give the frame_id in override_camera_frame_id.
If you give it a non-empty string, /imgproc/undistort_node will rewrite the frame_id in camera_info.
For example, you can give a different tf_static as follows.
ros2 launch yabloc_launch sample_launch.xml override_camera_frame_id:=fake_camera_optical_link
ros2 run tf2_ros static_transform_publisher \
--frame-id base_link \
--child-frame-id fake_camera_optical_link \
--roll -1.57 \
--yaw -1.570| topic name | msg type | description |
|---|---|---|
/localicazation/pf/pose |
geometry_msgs/msg/PoseStamped |
estimated pose |
/localicazation/pose_estimator/pose_with_covariance |
geometry_msgs/msg/PoseStamped |
estimated pose with covariance |
This project contains original rviz plugins. rviz2_overlay_plugins

| index | topic name | description |
|---|---|---|
| 1 | /localicazation/imgproc/lanelet2_overlay_image |
Projection of lanelet2 (yellow lines) onto image based on estimated pose. If they match well with the actual road markings, it means that the localization performs well. |
| 2 | /localicazation/imgproc/segmented_image |
result of graph-based segmetation. yellow area is identified as the road surface. |
| 3 | /localicazation/pf/cost_map_image |
cost map generated from lanelet2. |
| 4 | /localicazation/imgproc/image_with_line_segments |
detected line segments |
| 5 | /localicazation/map/ground_status |
ground height and tilt estimatation status |
| 6 | /localicazation/twist/kalman/status |
twist estimation status |
| 7 | /localicazation/pf/predicted_particle_marker |
particle distribution of particle fitler (red means a probable candidate) |
| 8 | /localicazation/pf/gnss/range_marker |
particle weight distribution by GNSS |
| 9 | /localicazation/pf/scored_cloud |
3D projected line segments. the color means the how match they are |
YabLoc is licensed under Apache License 2.0.