@article{li2024hcto,
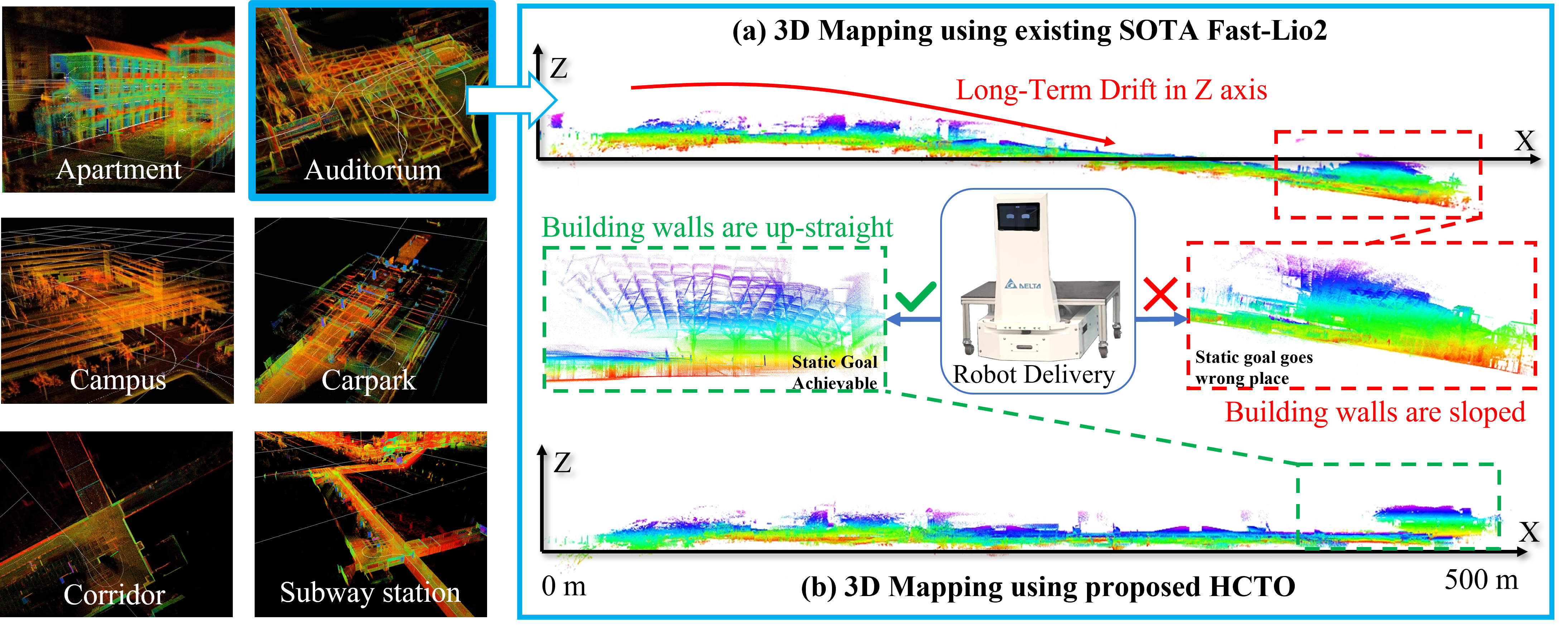
title={HCTO: Optimality-aware LiDAR inertial odometry with hybrid continuous time optimization for compact wearable mapping system},
author={Li, Jianping and Yuan, Shenghai and Cao, Muqing and Nguyen, Thien-Minh and Cao, Kun and Xie, Lihua},
journal={ISPRS Journal of Photogrammetry and Remote Sensing},
volume={211},
pages={228--243},
year={2024},
publisher={Elsevier}
}
More experiments are listed on Youtube.
4. Evaluation in WHU-Helmet dataset (https://github.com/kafeiyin00/WHU-HelmetDataset)