Notes: Please install GitHub with MathJax to view LaTex formulation, Thank you.
-
Definition: A camera projects 3D world-points onto the 2D image plane.
-
Calibration: Finding the quantities internal to the camera that affect this imaging process
- Image center
- Focal length
- Lens distortion parameters
-
Basic coordinate
- world coordinate
- camera coordinate
- image coordinate
- plane coordinate (defined by myself for easily explaining)
-
Main procedures
- stage 1: from world coordinate to camera coordinate, this is from 3D points to 3D points including
$R$ and$t$ etc. parameters. - stage 2: from camera coordinate to image coordinate, this is from 3D to 2D points including
$K$ (camera intrinsic) etc. parameters.
- stage 1: from world coordinate to camera coordinate, this is from 3D points to 3D points including
-
From world coordinate to camera coordinate
- Coordinate introduction
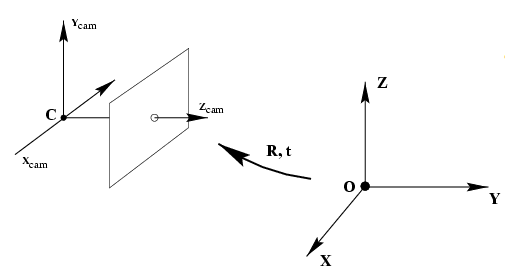
From world coordinate to camera coordinate needs two operations: translate and rotation. It can be simply described: firstly, translate the origin of word to the camera coordinate location and then rotate it for aligning the coordinates. $$ \widetilde{X}_{cam} = R(\widetilde{X}-\widetilde{C}) $$ Where,
$R$ rotation matrix$\widetilde{X}$ and$\widetilde{C}$ is the location in the world coordinate respectively
$\widetilde{X}_{cam}$ is the location in the camera coordinate- From world coordinate to camera coordinate
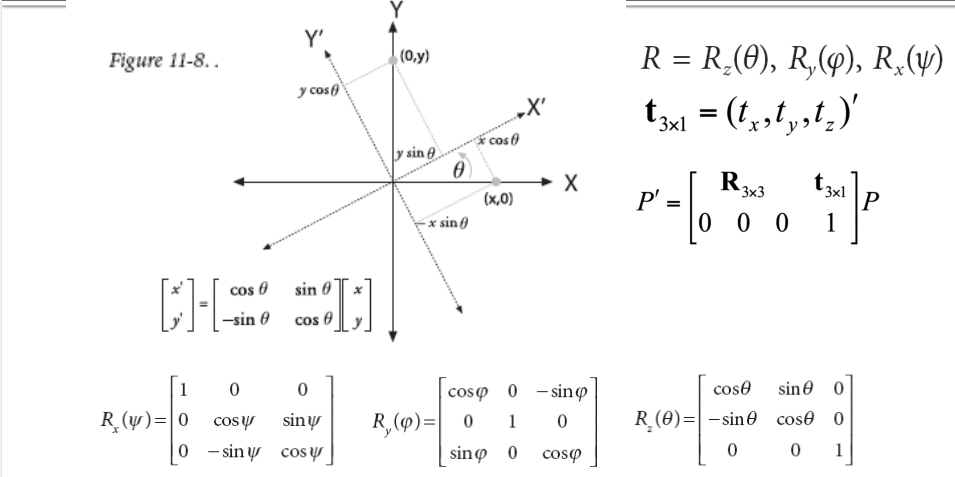
We set
$R=R_x(\psi)R_y(\varphi)R_z(\theta)$ therefore, $$ X_{cam}=\left( \begin{array}{ccc}X_{cam}\\1\end{array}\right)=\left[\begin{array}{ccc}R&−R\widetilde{C}\\0&1\end{array}\right]\left( \begin{array}{ccc}\widetilde{X}\\1\end{array}\right)=\left[\begin{array}{ccc}R&−R\widetilde{C}\\0&1\end{array}\right]X $$ Where we also can say$t=R\widetilde{C}$ and the$X$ we will discuss later. -
From camera coordinate to image coordinate
- Coordinate introduction

Where,
$C$ is camera center$Z$ is principal axisThe plane of
$p$ is image plane, it is a 2D plane$p$ is principal point$f$ is focal length, the distance between$C$ and$p$ The plane coordinate
$xpy$ is paralleled with the camera coordinate$XCY$ and the measure value is$metre(m)$ The image coordinate usually said the relative coordinate to plane coordinate, its origins is in the left-bottom corner, measured by the numbers of
$pixel$ - From camera coordinate to plane coordinate
Given
$X$ in the our real world, the corresponding point in the camera coordinate is$x$ . Requirement from$X(X,Y,Z)$ to$x(x,y)$ . Note:$(X,Y,Z)$ is in the camera coordinate and$(x,y)$ is in the plane coordinate (different with image coordinate, the origins is different). We can get: $$ x=f\cdot\frac{X}{Z} \ y=f\cdot\frac{Y}{Z} \ (X,Y,Z)↦(f\cdot\frac{X}{Z},f\cdot\frac{Y}{Z}) $$ In matrix, $$ \left(\begin{array}{ccc}X\\Y\\Z\\1\end{array}\right)↦ \left(\begin{array}{ccc}f\cdot{X}\\f\cdot{Y}\\Z\end{array}\right)= \left[\begin{array}{ccc}f & 0 & 0 & 0 \\ 0 & f & 0 & 0\\0&0&1&0\end{array}\right] \left(\begin{array}{ccc}X\\Y\\Z\\1\end{array}\right) $$ Abbreviation,$P$ is the projection matrix but not complete now. $$ x=PX $$- Adding offset
We have converted object point from camera coordinate to plane coordinate, but our target is get the image coordinate.

We know,
$p$ is the origin of plane coordinate but it is$(p_x,p_y)$ in the image coordinate. $$ (X,Y,Z)↦(f\cdot\frac{X}{Z}+p_x,f\cdot\frac{Y}{Z}+p_y) $$ Matrix, (can divided by$Z$ ) $$ \left(\begin{array}{ccc}X\\Y\\Z\\1\end{array}\right)↦ \left(\begin{array}{ccc}f\cdot{X}+Zp_x\\f\cdot{Y}+Zp_y\\Z\end{array}\right)= \left[\begin{array}{ccc}f & 0 & p_x & 0 \\ 0 & f & p_y & 0\\0&0&1&0\end{array}\right] \left(\begin{array}{ccc}X\\Y\\Z\\1\end{array}\right) $$ Therefore, $$ \left(\begin{array}{ccc}fX+Zp_x\\fY+Zp_y\\Z\end{array}\right)= \left[\begin{array}{ccc}f & 0 & p_x \\ 0 & f & p_y \\0&0&1\end{array}\right] \left[\begin{array}{ccc}1 & 0 & 0&0 \\ 0 & 1 & 0 &0\\0&0&1&0\end{array}\right] \left(\begin{array}{ccc}X\\Y\\Z\\1\end{array}\right) $$ Here,$K$ named intrinsic parameters is defined by $$ K=\left[\begin{array}{ccc}f & 0 & p_x \\ 0 & f & p_y \\0&0&1\end{array}\right] $$ And$P$ , we can assume the rotation matrix$R$ is$I$ , and the translate matrix$t$ is$0$ $$ P=K*[I|0] $$- From plane coordinate to image coordinate
$$ x=K[I|0]X_{cam}=K[R|-R\widetilde{C}]X $$
The final
$p$ is $$ P=K[R|t] $$ Where$R, t$ is named the camera extrinsic parameters.- Convert the image coordinate by pixel
In the image coordinate, it usually use the pixel to measure not m. So, we need another step. We set
$m_{x}$ is the numbers of pixel of$1m$ in the horizontal and,$m_{y}$ denotes the numbers of pixels of$1m$ in theThus, we can get the area of one pixel (
$m^2$ ), $$ \frac{1}{m_{x}}\times\frac{1}{m_y} $$ The pixel can be not the square, it also can be rectangle. We update$K$ $$ K=\left[\begin{array}{ccc}m_{x} & 0 & 0 \\ 0 & m_{y} & 0 \\0&0&1\end{array}\right] \left[\begin{array}{ccc}f & 0 & p_x \\ 0 & f & p_y \\0&0&1\end{array}\right]= \left[\begin{array}{ccc}f_{x} & 0 & c_x \\ 0 & f_{y} & c_y \\0&0&1\end{array}\right] $$ Generally, when we use camera intrinsic parameters$K$ to calculate, the provided parameters is converted values, e.g. it will provide$f_{x},f_{y},c_{x},c_{y}$ .- Summary
The final formulation is, $$ \left(\begin{array}{ccc}xZ\\yZ\\Z\end{array}\right)= \left[\begin{array}{ccc}f_{x} & 0 & c_x \\ 0 & f_{y} & c_y \\0&0&1\end{array}\right] [R_{3x3}|t_{3x1}] \left(\begin{array}{ccc}X\\Y\\Z\\1\end{array}\right) $$ Thus, we can get
$x(x,y)$ $$ \left(\begin{array}{ccc}xZ\\yZ\\Z\end{array}\right)\frac{1}{Z}↦ \left(\begin{array}{ccc}x\\y\\1\end{array}\right) $$ -
Considering Distortion Parameters
The distortion Parameters includes
Radial distortionandtangential distortion-
Radial distortion includes barrel distortion, pincushion distortion and mustache distortion.
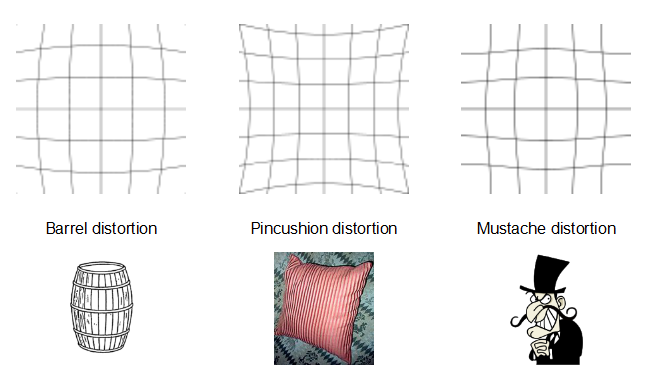
It can be corrected by $$ x_{corr}=x_{dis}(1+k_{1}r^2+k_{2}r^4+k_{3}r^6)\ y_{corr}=y_{dis}(1+k_{1}r^2+k_{2}r^4+k_{3}r^6) $$
-
tangential distortion
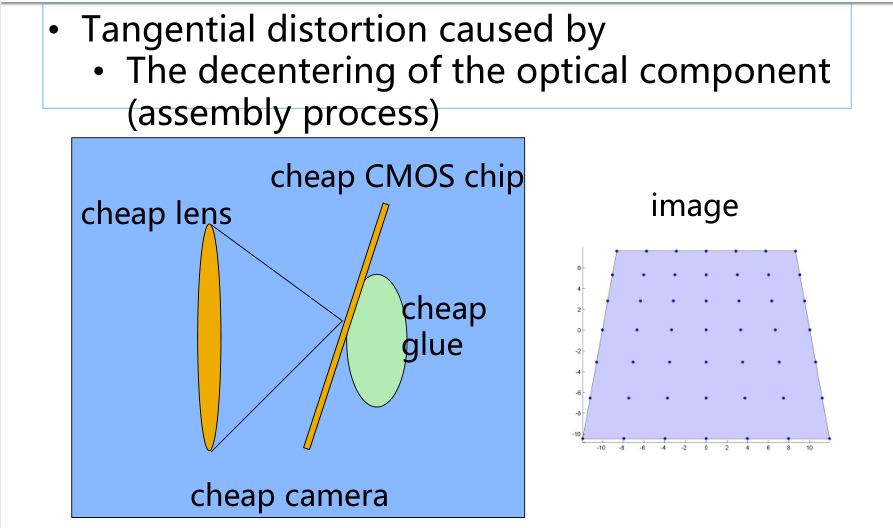
It can be corrected by $$ x_{corr}=x_{dis}+[2p_{1}xy+p_{2}(r^2+2x^2)]\ y_{corr}=y_{dis}+[p_{1}(r^2+2y^2)+2p_{2}xy] $$ Where,
$x_{dis},y_{dis}$ represent the distorted coordinate$x_{corr},y_{corr}$ represent the corrected coordinate$k_{1},k_{2},k_{3}$ is the radial distortion parameters$p_{1},p_{2}$ is the tangential distortion parametersTherefore, we get 5 distortion parameters $$ D=(k_{1},k_{2},p_{1},p_{2},k_{3}) $$
-




-
Using opencv api to calibrate camera, you need to change img_root in calibration_opencv.py
python calibration_opencv.py
-
Maybe you want to use harris detector to try using your image.
python harris_detector.py -
Self-implement main steps: (see scripts for more information and feel free to modify)
-
Use your camera or phone take several pictures (at least 4), put in the chessboards_imgs directory
-
Run detect_keypoints_sift.py for each pattern images in chessboards_imgs directory to get related keypoints and descriptors. For example:
python detect_keypoints_sift.py --in_fname ./chessboards_imgs/left01.jpg --out_fname keypoints_dir/left01.txt
-
Run sift_match.py for each pattern images in chessboards_imgs directory to get related keypoints and descriptors. For example:
python match_keypoints.py --in_fname_1 ./chessboards_imgs/left01.jpg --in_fname_2 ./chessboards_imgs/left01.jpg --out_fname match_left01_to_left02.txt
-
Run calibrate_intrinsics.py to calculate camera intrinsics.
python calibrate_intrinsics.py --pattern_key_fname keypoints_dir/left01.txt --img_keypoints_root ./keypoints_dir/ --select_match_keypoints_root ./select_match_keypoints_dir/ --example_image ./meilan_note6_resized/note01.jpg
-
-
Do perspective_transform using opencv api, you need to change the image path in the perspective_transform.py
python perspective_transform.py
Notes: need to adjust related parameters to get a better result.
[TODO] Implement the function calibrateCamera.
If you have any question or find any problems, please contact me or issue.