livox_autoware_driver is modified on the basis of livox_ros_driver and adapts to the Autoware self-driving software. It allows users to start livox lidar or livox hub directly through Autoware runtime manager and can automatically synchronize multiple lidars when connecting livox hub.
Developer: Livox
To install livox_autoware_driver, we strongly recommend using Docker Method. Otherwise, you can install it from source by following the Source Method.
NOTE: Docker Method has higher stability, because different system environments may cause the Source Method to fail.
-
For docker installation, please consult Docker's installation website.
-
Download livox_autoware_driver:
mkdir ~/livox_autoware_ws && cd ~/livox_autoware_ws git clone https://github.com/Livox-SDK/livox_autoware_driver.git -
Build the Docker Image:
NOTE: If you need nvidia cuda surpport, please set 'FROM' command in Dockerfile to:
FROM autoware/autoware:latest-melodic-cuda
And set theCUDA="off"option in run_livox.sh to:
CUDA="on"cd ~/livox_autoware_ws/livox_autoware_driver/ docker build -t autoware/livox:latest .
- Installing Autoware from source by following the source build instructions.
- Download livox_autoware_driver:
cd /YOUR_AUTOWARE_LOCATE_PATH/src/drivers/awf_drivers/ git clone https://github.com/Livox-SDK/livox_autoware_driver.git - Rewrite autoware runtime manager files:
cd /YOUR_AUTOWARE_LOCATE_PATH/src/drivers/awf_drivers/livox_autoware_driver cp -f scripts/* /YOUR_AUTOWARE_LOCATE_PATH/src/autoware/utilities/runtime_manager/scripts/ - Rebuild autoware source files following the instructions. For example, for 1.12.0 and Newer:
With CUDA supportWithout CUDA SupportAUTOWARE_COMPILE_WITH_CUDA=1 colcon build --cmake-args -DCMAKE_BUILD_TYPE=Releasecolcon build --cmake-args -DCMAKE_BUILD_TYPE=Release
-
Start the autoware runtime manager.
For Docker Installation Method:cd ~/livox_autoware_ws/livox_autoware_driver/ sudo chmod +x run_livox.sh ./run_livox.sh roslaunch runtime_manager runtime_manager.launchFor Source Installation Method:
cd /YOUR_AUTOWARE_LOCATE_PATH/ source install/setup.bash roslaunch runtime_manager runtime_manager.launch -
Set
Localizername to Livox :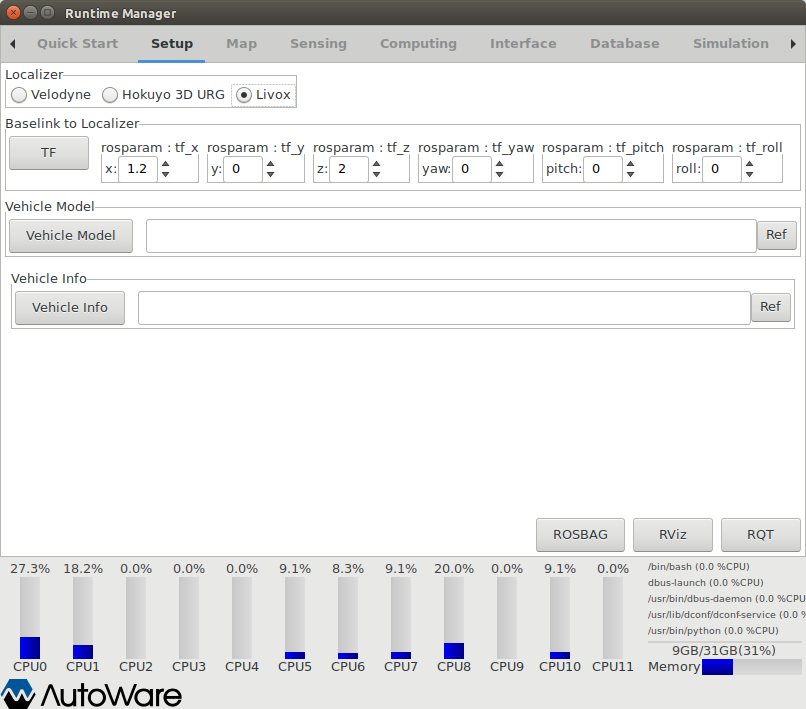

-
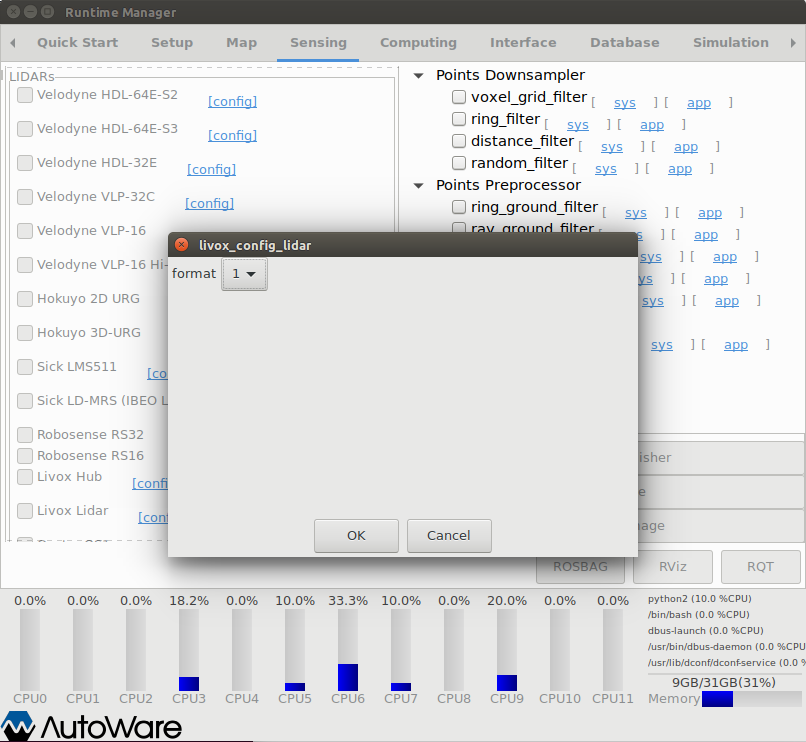
Config livox lidar pointcloud format as described in livox_ros_driver . You can select different formats by clicking [ config ] after the 'Livox Lidar':
-
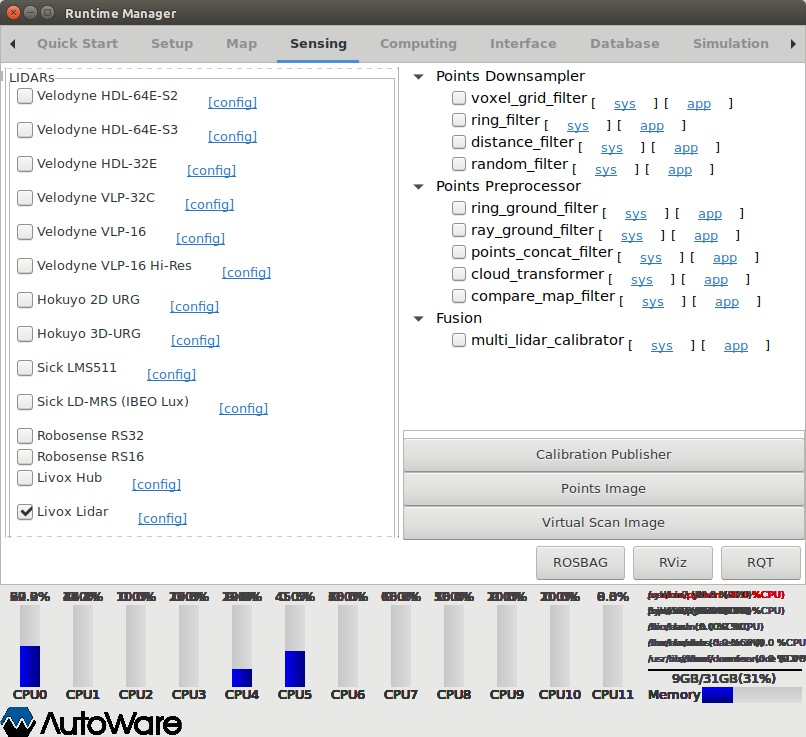
Select 'Livox Lidar' in Sensing/LIDARs to start livox_autoware_driver, as shown below:
-
To check whether livox_autoware_driver startes correctly, you can open a terminal and check the topic type of '/points_raw'. The output type should be the same as the format you selected. Such as:
$ rostopic type /points_raw sensor_msgs/PointCloud2or
$ rostopic type /points_raw livox_ros_driver/CustomMsg


-
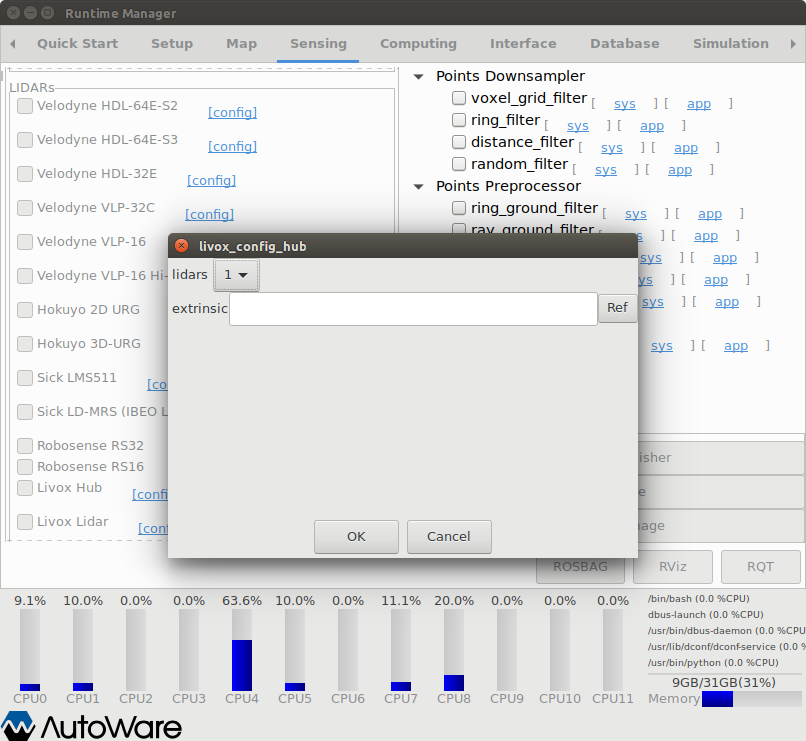
Set the number and extrinsic parameters of lidars inserted into the livox hub by clicking [ config ] after the 'Livox Hub':
NOTE:
- The number of 'lidars' must be set equal to the number of lidars inserted into the livox hub.
- Multiple lidars must be inserted into hub slots in the order of 1, 2, 3..., and the slot number cannot be interrupted.
- If 'extrinsic' is not set, the extrinsic parameter of each lidar will be set to 'Identity' by default.
- An extrinsic config file should in the same format as livox_autoware_driver/livox_ros_driver/config/extrinsic.csv: the first row represents the parameter of the lidar inserted into the first hub slot and is arranged in the format of "roll, pitch, yaw, x, y, z,". The other rows are the same as the first row.
-
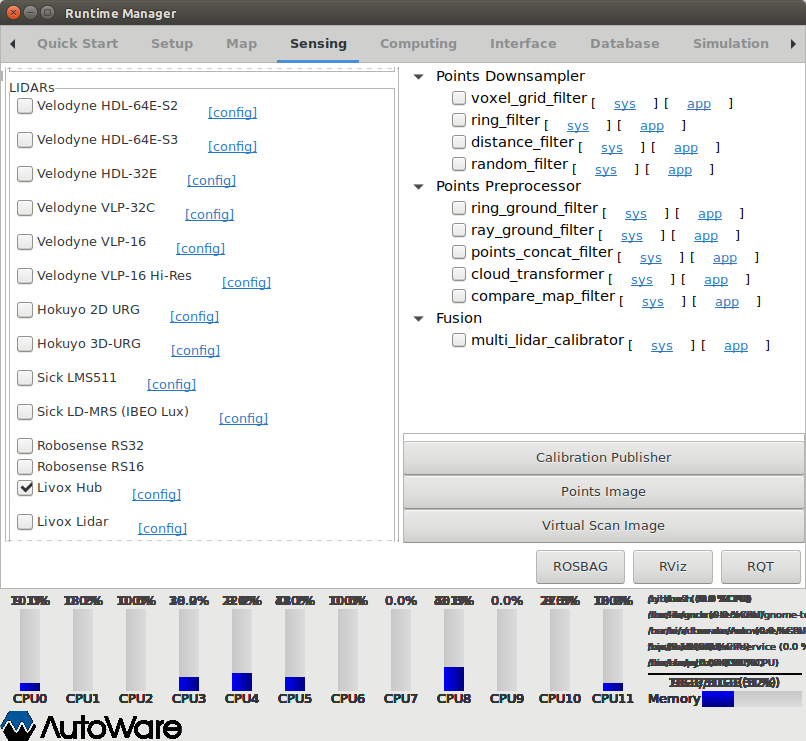
Select 'Livox Hub' in Sensing/LIDARs to start livox_autoware_driver, as shown below:
-
To check whether livox_autoware_driver startes correctly, you can open a terminal and check the topic type of '/points_raw'. The output type should be 'sensor_msgs/PointCloud2'. Such as:
$ rostopic type /points_raw sensor_msgs/PointCloud2


You can get support from Livox with the following methods :
- Send email to dev@livoxtech.com with a clear description of your problem and your setup
- Report issue on github