This will be a repository for exploring SLAM topics based lectures by Professor Claus Brenner. Rather than Python, the associated code for the lectures and assignments will be written in modern C++.
- CMake
- Compiler version that supports C++17
-
Clone repo
git clone git@github.com:patrick--/SLAM-Exploration.git -
Move into clone repo
cd SLAM-Exploration -
Create build directory and generate build dependencies
mkdir build && cd build cmake ..
-
Build All Examples
make
-
Run Examples
./UnitA/slam_01_a_plot_motor_ticks
robot4_motors.txt- Sample motor encoder data from robot
-
slam_01_a_plot_motor_ticks.cpp- Plot the raw motor encoder data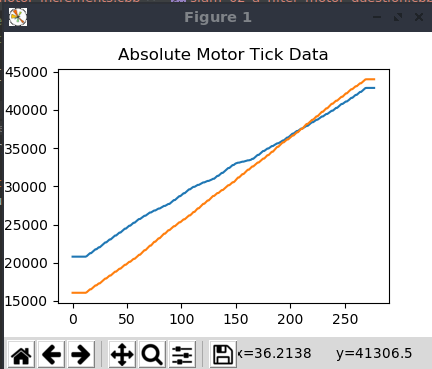
-
slam_01_b_print_motor_increments.cpp- Print differential motor encoder data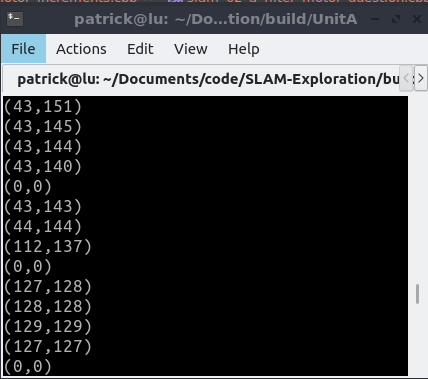
-
slam_01_c_plot_motor_increments.cpp- Plot differential motor encoder data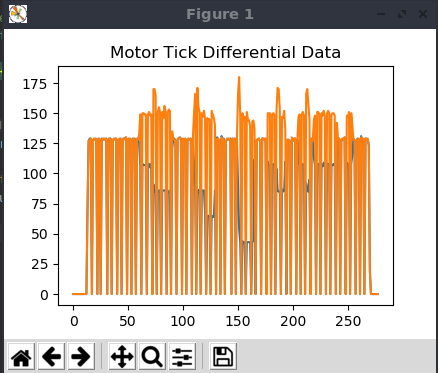



-
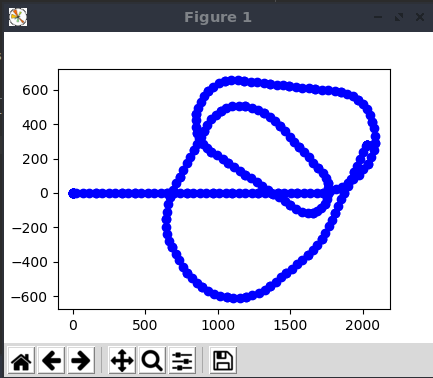
slam_02_a_filter_motor_question.cpp- Plot robots movement in 2D utilizing motor sensor data and motion equations.