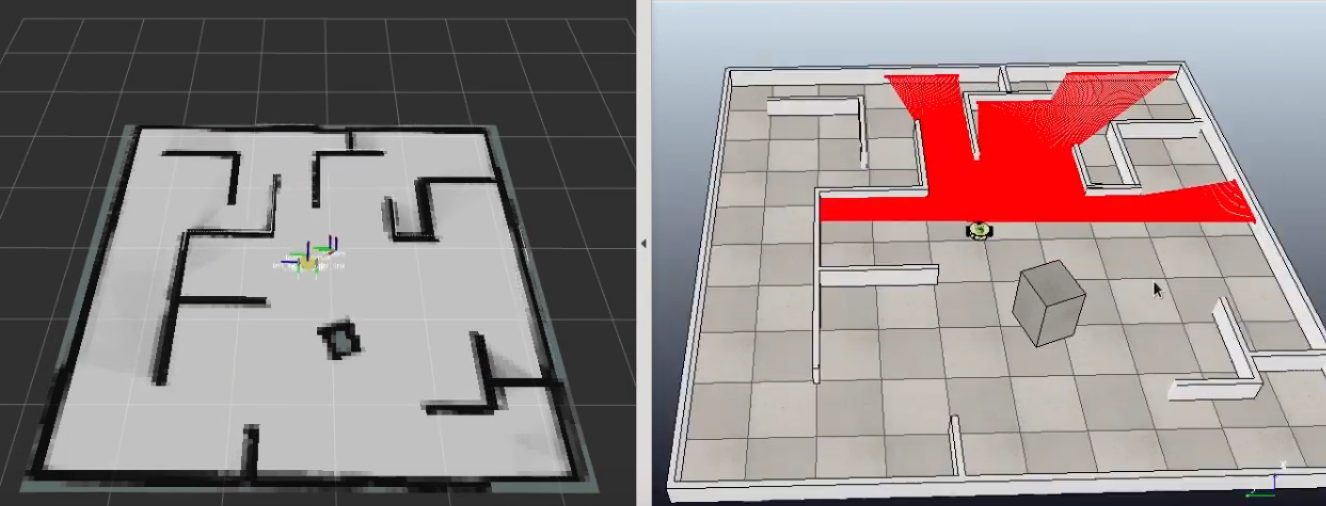
This package contains comparison between the mapping algorithms available in ros : Gmapping and Cartographer using pocker_bot in V-REP.
Click the image below to view the video of implementation:
Clone pocker_bot_vrep_description to your catkin_ws.
Open V-REP with mapping_scene.ttt. Make sure you run roscore before opening V-REP to load Ros Interface.
To run cartographer, run cartographer_mapping.launch by roslaunch cartographer_mapping cartographer_mapping.launch
Publications:
- /map
- /submap_list
Change cartographer.lua in configuration_files folder to tune the parameter based on your platform.
To run gmapping, run gmapping_mapping.launch by roslaunch cartographer_mapping gmapping_mapping.launch
Publications:
- /map
- /map_metadata
Change parameters for slam_gmapping node in gmapping_mapping.launch to tune for your platform.