This repo is the official implementation of the paper:
Deep Keypoint-Based Camera Pose Estimation with Geometric Constraints.
You-Yi Jau*, Rui Zhu*, Hao Su, Manmohan Chandraker (*equal contribution)
IROS 2020
See our arxiv, paper and video for more details.

# please clone without git lfs and download from google drive if possible
# "This repository is over its data quota. Purchase more data packs to restore access."
export GIT_LFS_SKIP_SMUDGE=1
git clone https://github.com/eric-yyjau/pytorch-deepFEPE.git
git pull --recurse-submodules- python == 3.6
- pytorch >= 1.1 (tested in 1.3.1)
- torchvision >= 0.3.0 (tested in 0.4.2)
- cuda (tested in cuda10)
conda create --name py36-deepfepe python=3.6
conda activate py36-deepfepe
pip install -r requirements.txt
pip install -r requirements_torch.txt # install pytorch
- install superpoint module
git clone https://github.com/eric-yyjau/pytorch-superpoint.git
cd pytorch-superpoint
git checkout module_20200707
# install
pip install --upgrade setuptools wheel
python setup.py bdist_wheel
pip install -e .
- if
asciierror
export LC_ALL=en_US.UTF-8
export LANG=en_US.UTF-8
export LANGUAGE=en_US.UTF-8
- Data preprocessing
cd deepFEPE_data
- Follow the instructions in the README.
- Process
KITTIdataset for training or testing. - Process
ApolloScapedataset for testing.
- Key items
dump_root: '[your dumped dataset]' # apollo or kitti
if_qt_loss: true # use pose-loss and F-loss (true) or only F-loss (false)
if_SP: true (use superpoint instead of SIFT)/ false (SIFT)
# deepF
retrain: true (new deepF model)/ false (use pretrained deepF)
train: true (train the model)/ false (freeze weights)
pretrained: [Path to pretrained deepF]
# superpoint
retrain_SP: true (new superpoint model)/ false (use pretrained_SP)
train_SP: true (train SP model)/ false (freeze SP weights)
pretrained_SP: [Path to pretrained SP]Prepare the dataset. Use training commands following steps 1 to 3 (skip step 0). Visualize training and validation with Tensorboard.
- KITTI
python deepFEPE/train_good.py train_good deepFEPE/configs/kitti_corr_baseline.yaml test_kitti --eval
- ApolloScape
python deepFEPE/train_good.py train_good deepFEPE/configs/apollo_train_corr_baseline.yaml test_apo --eval
- config file:
deepFEPE/configs/kitti_corr_baseline.yaml - config:
- set
dump_rootto[your dataset path] - set
if_SPtoFalse
- set
- run training script
- Follow the instruction in pytorch-superpoint.
- Or use the pretrained models.
- git lfs file:
deepFEPE/logs/superpoint_models.zip- KITTI:
deepFEPE/logs/superpoint_kitti_heat2_0/checkpoints/superPointNet_50000_checkpoint.pth.tar - Apollo:
deepFEPE/logs/superpoint_apollo_v1/checkpoints/superPointNet_40000_checkpoint.pth.tar
- KITTI:
- config:
- Set
if_SPtoTrue. - Add
pretrained_SPpath.
- Set
- config:
- Set
traintoTrue - Set
train_SPtoTrue - Set the pretrained paths in
pretrainedandpretrained_SP. - Set
if_qt_loss: truefor pose-loss.
- Set
- KITTI: use
kitti_corr_baselineEval.yaml
python deepFEPE/train_good.py eval_good deepFEPE/configs/kitti_corr_baselineEval.yaml eval_kitti --test --eval # use testing set (seq 09, 10)
- ApolloScape: use
apollo_train_corr_baselineEval.yaml
python deepFEPE/train_good.py eval_good deepFEPE/configs/apollo_train_corr_baselineEval.yaml eval_apo --test --eval
You can use our pretrained models for testing. Just put the paths in the config file.
- Download through
git-lfsor Google drive
git lfs ls-files # check the files
git lfs fetch
git lfs pull # get the files
git pull
(Refer to the config.yml and checkpoints/ in the folder)
- KITTI models (trained on KITTI):
- git lfs file:
deepFEPE/logs/kitti_models.zip - SIFT Baselines:
baselineTrain_deepF_kitti_fLoss_v1baselineTrain_sift_deepF_kittiPoseLoss_v1baselineTrain_sift_deepF_poseLoss_v0
- SuperPoint baselines:
baselineTrain_kittiSp_deepF_kittiFLoss_v0baselineTrain_kittiSp_deepF_kittiPoseLoss_v1
- DeepFEPE:
baselineTrain_kittiSp_deepF_end_kittiFLoss_freezeSp_v1baselineTrain_kittiSp_deepF_end_kittiFLossPoseLoss_v1_freezeSpbaselineTrain_kittiSp_kittiDeepF_end_kittiPoseLoss_v0
- git lfs file:
- Apollo models (trained on Apollo, under apollo/):
- git lfs file:
deepFEPE/logs/apollo_models.zip - SIFT baselines:
baselineTrain_sift_deepF_fLoss_apolloseq2_v1baselineTrain_sift_deepF_poseLoss_apolloseq2_v0baselineTrain_sift_deepF_apolloFLossPoseLoss_v0
- SuperPoint baselines:
baselineTrain_apolloSp_deepF_fLoss_apolloseq2_v0baselineTrain_apolloSp_deepF_poseLoss_apolloseq2_v0
- DeepFEPE:
baselineTrain_apolloSp_deepF_fLoss_apolloseq2_end_v0_freezeSp_fLossbaselineTrain_apolloSp_deepF_poseLoss_apolloseq2_end_v0baselineTrain_apolloSp_deepF_fLossPoseLoss_apolloseq2_end_v0_freezeSp_fLoss
- git lfs file:
cd deepFEPE/
python run_eval_good.py --help
- update your dataset path in
configs/kitti_corr_baselineEval.yamlandconfigs/apollo_train_corr_baselineEval.yaml - set the model names in
deepFEPE/run_eval_good.py
def get_sequences(...):
kitti_ablation = { ... }
apollo_ablation = { ... }- check if the models exist
# kitti models on kitti dataset
python run_eval_good.py --dataset kitti --model_base kitti --exper_path logs --check_exist
# kitti models on apollo dataset
python run_eval_good.py --dataset apollo --model_base kitti --exper_path logs --check_exist
# apollo models
python run_eval_good.py --dataset kitti --model_base apollo --exper_path logs/apollo --check_exist
- run the evaluation (dataset should be ready)
python run_eval_good.py -dataset kitti --model_base kitti --exper_path logs --runEval
- open jupyter notebook
- read the sequences from the config file:
table_trans_rot_kitti_apollo.yaml
base_path: '/home/yoyee/Documents/deepSfm/logs/' # set the base path for checkpoints
seq_dict_test:
Si-D.k: ['eval_kitti', 'DeepF_err_ratio.npz', '07/29/2020']- print out the numbers based on the setting in the config file
jupyter notebook
# navigate to `notebooks/exp_process_table.ipynb`
git lfs ls-files # check the files
git lfs fetch
git lfs pull # get the files
- unzip
cd deepFEPE/logs/results/
unzip 1107.zip
unzip 1114.zip
unzip new_1119.zip
- put to the same folder
ln -s 1114/* . # do the same for the other folders
-
Then, you can follow the instructions in
Read out the results. -
Trajectory results are in
deepFEPE/logs/results/trajectory.zip.
jupyter notebook
# navigate to `notebooks/exp_process_table.ipynb`
- convert the
relative_pose_bodyto absoluted poses - export the poses to two files for sequence
09and10. - use
kitti-odom-evalfor evaluation.
tensorboard --logdir=runs/train_good
- visualization
- Ex: Train SIFT + DeepF
- check loss: gt should always be 1

- check R, t inlier ratio:
rotation: q, angle: 0.01 to 180 translation: t, angle: 0.01 to 180 # (higher the better) # pick the checkpoints through inlier ration
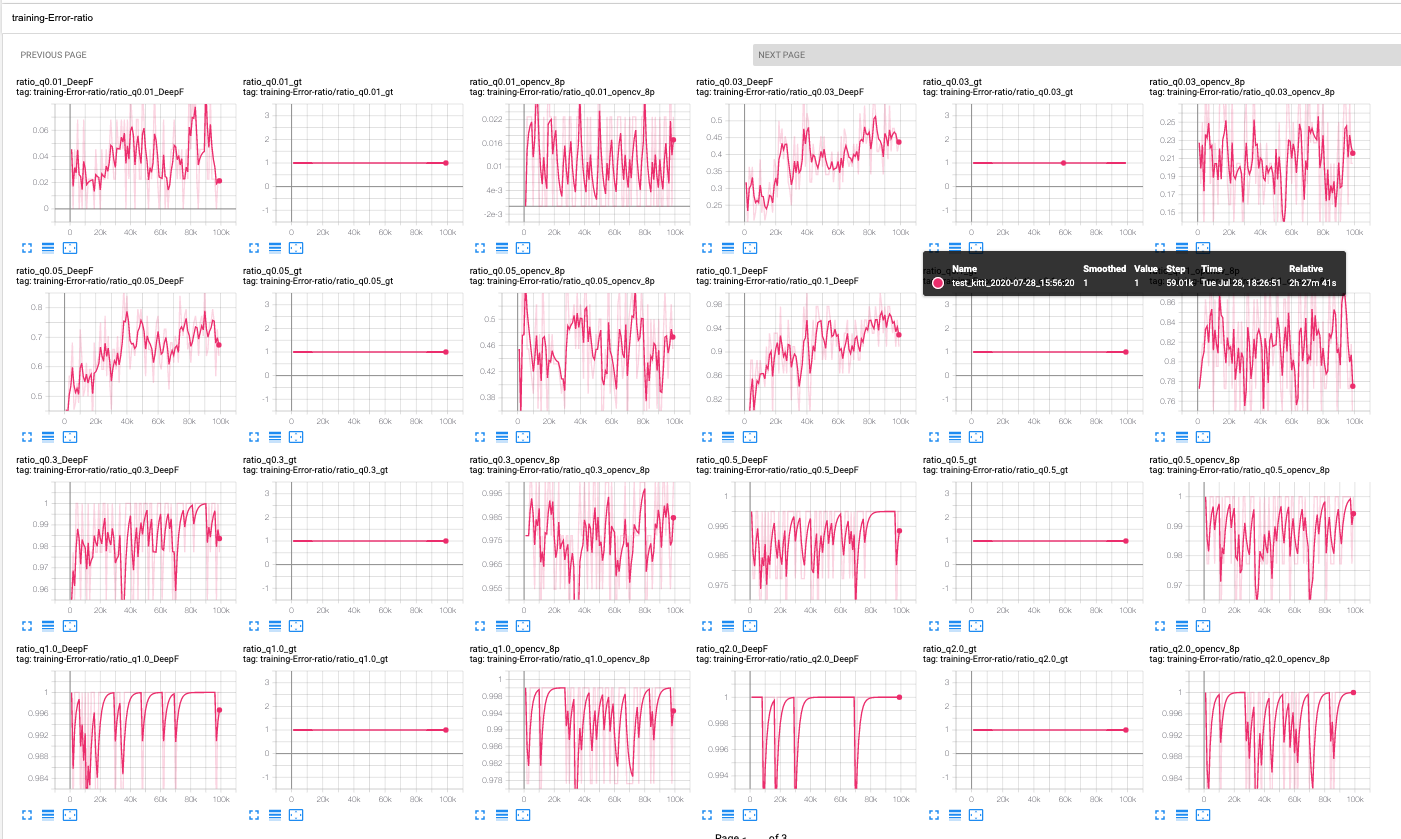
- check loss: gt should always be 1
- Ex: Train SIFT + DeepF


Please cite the following papers.
- DeepFEPE
@INPROCEEDINGS{2020_jau_zhu_deepFEPE,
author={Y. -Y. {Jau} and R. {Zhu} and H. {Su} and M. {Chandraker}},
booktitle={2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
title={Deep Keypoint-Based Camera Pose Estimation with Geometric Constraints},
year={2020},
volume={},
number={},
pages={4950-4957},
doi={10.1109/IROS45743.2020.9341229}}
- SuperPoint
@inproceedings{detone2018superpoint,
title={Superpoint: Self-supervised interest point detection and description},
author={DeTone, Daniel and Malisiewicz, Tomasz and Rabinovich, Andrew},
booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops},
pages={224--236},
year={2018}
}
- DeepF
@inproceedings{ranftl2018deep,
title={Deep fundamental matrix estimation},
author={Ranftl, Ren{\'e} and Koltun, Vladlen},
booktitle={Proceedings of the European Conference on Computer Vision (ECCV)},
pages={284--299},
year={2018}
}
This implementation is developed by You-Yi Jau and Rui Zhu. Please contact You-Yi for any problems.
DeepFEPE is released under the MIT License.