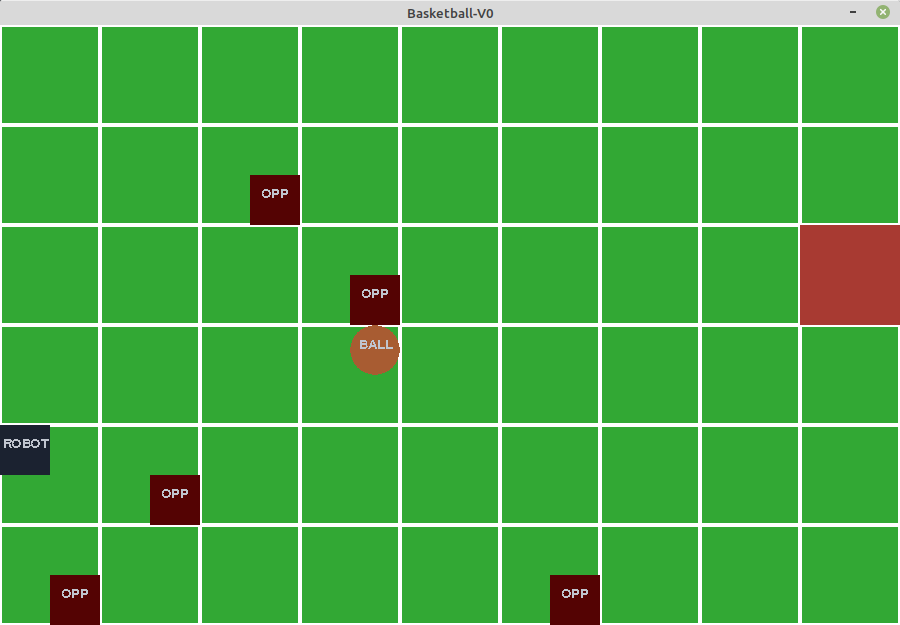
Robot Playing Basketball with Reinforcement Learning By : Eko Rudiawan Overview Forward walking with motion command $cmd_x = 0.05$, $cmd_y = 0.00$, and $cmd_\theta = 0.00$