Humanoid-Walking-Pattern-Generator
Use Traditional Method ZMP and Learning Method PPO to generate Walking Pattern for Humanoid Robot
Requirements
- Pinocchio
- gym
- Pybullet
- Numpy
Env

- Simple Robot with eight force sensors under the feet
ZMP
-
2D inverted pendulum

There are several differential equations as below

-
2D linear inverted pendulum
When
 = 0 and f = Mg/cos
= 0 and f = Mg/cos , the Centroid will remain the same height as the pendulum falling. Because f * cos= Mg .
, the Centroid will remain the same height as the pendulum falling. Because f * cos= Mg .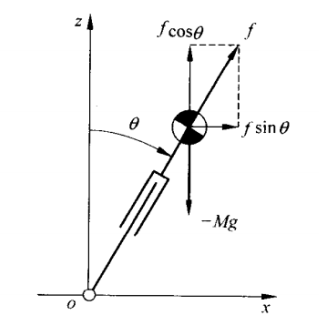
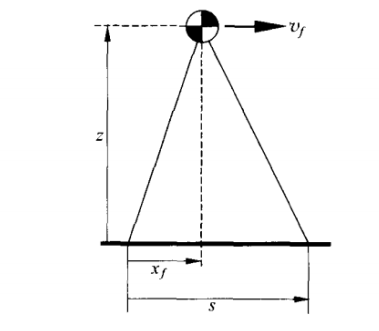
In the horizontal direction

given initial state x(0) x'(0) and target state x(t) x'(t) compute used time

orbital energy

-
Change Feet
 Given orbital energy
Given orbital energy









