-
Use qt5 to implement the ros robot human-machine interface
-
使用qt5实现ros机器人人机界面
-
Attention! This code is for learning purposes only and cannot be used for any other purpose without the author's permission.
-
注意!未经作者的许可,此代码仅用于学习,不能用于其他用途。
-
Continuously updating.....
-
持续更新中.....
-
Welcome to submit bugs in issues
-
欢迎在issues提交bug
1.Kinetic version branch(Branches are merged)
kinetic 版本分支(分支已合并)
2. Qml version branch Qml版本分支
- The interface is more beautiful, the function is simple, can be used as a robot on-board display
- 界面更加美观,功能简单,可作为机器人机载端显示
- qml_simple
- Before use, you must set the odom topic in the menu-settings-and-topic settings:
- 使用前须在菜单->设置->话题设置中设置odom话题:

- Before use, you must set the power topic(Std_msg/Float32) in the menu-settings-and-topic settings
- 使用前须在菜单->设置->话题设置中设置电量话题(Std_msg/Float32)



- Before use, you must set the amcl topic in the menu-settings-and-topic settings
- 使用前须在菜单->设置->话题设置中设置amcl话题
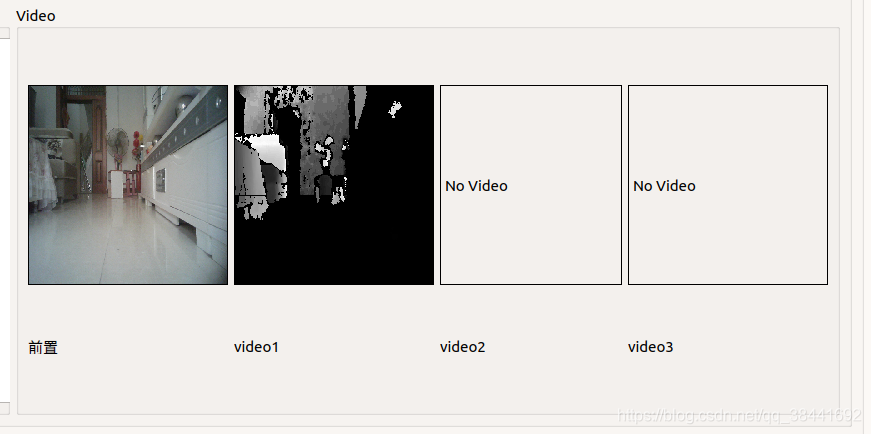
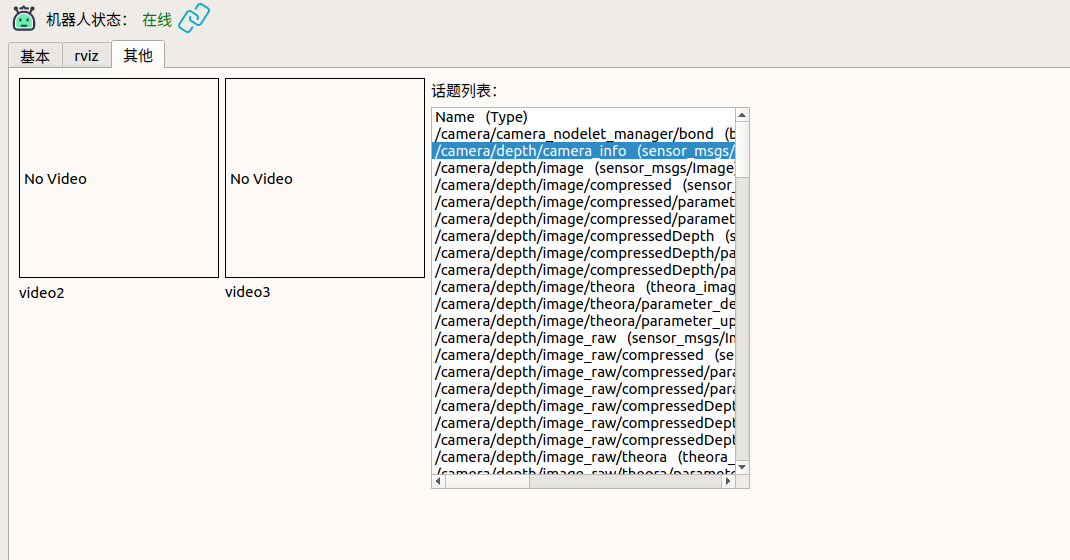
- Provides four image display forms that can display four images at the same time
- 提供四个图像显示窗体,可以同时显示四个图像
- Before use, you need to set the topic and image encoding of the image in the menu->settings->-video (the encoding must be correctly set, otherwise the image will not be displayed correctly). When setting the error, the prompt for coding the wrong is output in info, and the correct encoding is set according to the prompt)



sudo apt-get install ros-melodic-qt-createsudo apt-get install ros-melodic-qt-buildsudo apt-get install qtmultimedia5-devPut the package in the ros src package directory: 将软件包放入ros src软件包目录下:
catkin_makerosrun cyrobot_monitor cyrobot_monitorGNU GPL(GNU General Public License,GNU通用公共许可证)

- As long as the software contains products or code that follow this Agreement, the software must also comply with the GPL License Agreement, i.e. it must be open source free, not charged from a closed source, and not commercial software.
- 只要软件中包含了遵循本协议的产品或代码,该软件就必须也遵循 GPL 许可协议,也就是必须开源免费,不能闭源收费,不能作为商用软件。
Key features of GPL open source protocol GPL 开源协议的主要特点
- Copy Freedom allows software to be copied to anyone's computer without limiting the number of copies.
- 复制自由 允许把软件复制到任何人的电脑中,并且不限制复制的数量。
- Freedom of communication Allows software to be disseminated in various forms.
- 传播自由 允许软件以各种形式进行传播。
- Fee-based communication allows the software to be sold in a variety of media, but buyers must be made aware in advance that the software is free to be obtained;
- 收费传播 允许在各种媒介上出售该软件,但必须提前让买家知道这个软件是可以免费获得的;因此,一般来讲,开源软件都是通过为用户提供有偿服务的形式来盈利的。
- Fee-based communication allows the software to be sold in a variety of media, but buyers must be made aware in advance that the software is free to be obtained; Freedom of modification allows developers to add or remove the functionality of the software, but the software must still be licensed on a GPL license agreement after modification.
- 修改自由 允许开发人员增加或删除软件的功能,但软件修改后必须依然基于GPL许可协议授权。