Most of the code in this repo was developed by Behzad Boroujerdian and Hasan Genc from the Department Of Electrical and Computer Engineering at The University of Texas at Austin. I put some finishing touches and wrote the guidelines below in the hope that this will be useful for others. This is supposed to be a preliminary solution while Microsoft don't provide an alternative one.
This repository is developed based on the work forked from github user: rakeshshrestha31
- Build Microsoft's AirSim with g++ to get it working with ROS as the client
- Modified AirSim fork can be found in this repository.
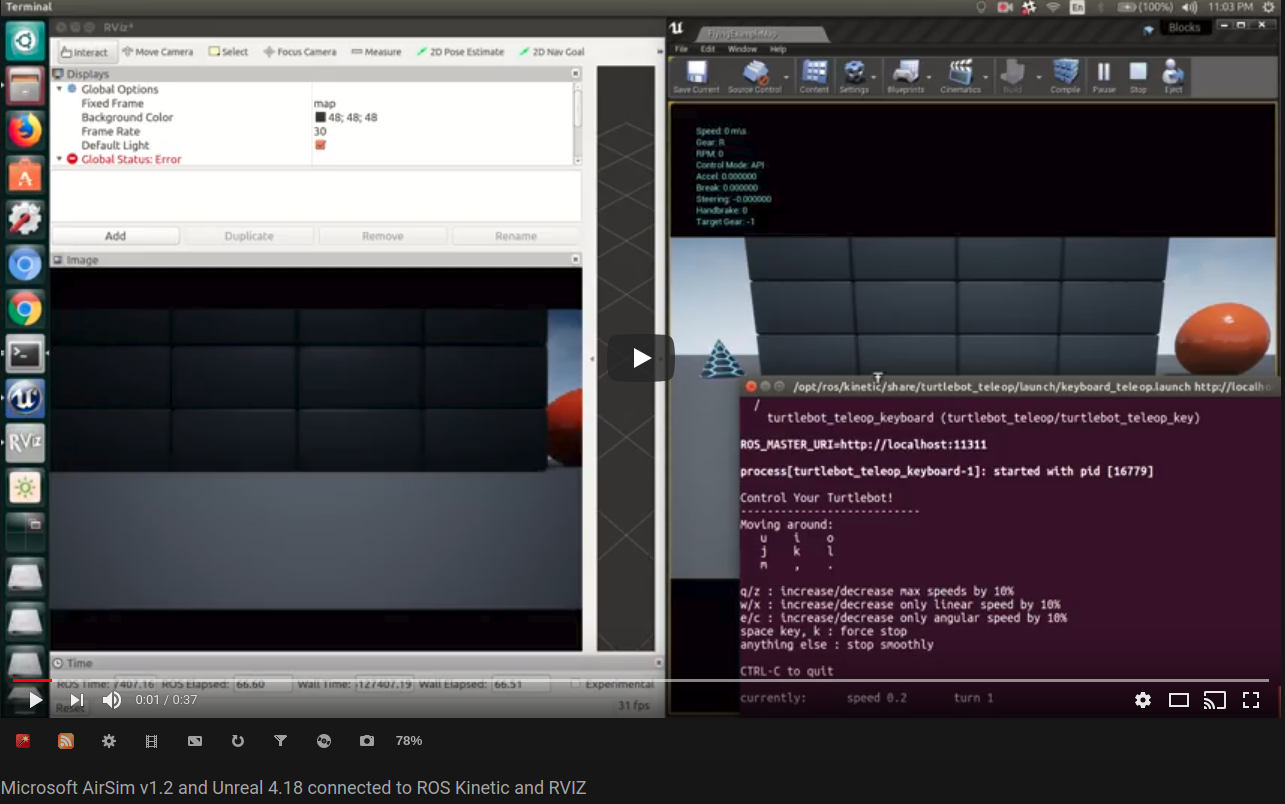
publishAirsimImgsrepository works with Unreal 4.18, AirSim v1.2 and ROS Kinetic tested on Ubuntu 16.04.- Example c++ code to stream images from a camera on the car in AirSim to a ROS topic called front_center/image_raw visualized on RVIZ. This data is obtained from the
front_centercamera of a car model used in AirSim whose movements are controlled by theteleopcode written for TurtleBot. The video below shows the demonstration of this example.
I assume that you already have installed Unreal 4.18 and AirSim v1.2 built on your machine. If not, then follow the link below. https://github.com/Microsoft/AirSim/blob/master/docs/build_linux.md
Please note that there is another instance of AirSim that has to be built with g++ instead of clang++ and is mentioned in the subsequent steps
This is the other instance of AirSim which is my fork that can build with g++. AirSim fork g++. Fork this repository and/or dowload it on your machine and navigate to the AirSim directory.
git clone https://github.com/aravindk2604/AirSim.git
Henceforth I will only discuss about the AirSim built with g++
Export the path of the AirSim directory as an environment variable AIRSIM_PATH before building the project.
export AIRSIM_PATH=~/your_work_directory/AirSim/
- Eigen3
sudo apt-get install libeigen3-dev
- MAVROS
sudo apt-get install ros-kinetic-mavros ros-kinetic-mavros-extras
-
CMAKE 3.12.1 Follow the answer posted by
Teoccion Stack Exchange link -
Clang++ v3.9 or newer to support C++14
To Install it you first need the archive signature:
wget -O - http://apt.llvm.org/llvm-snapshot.gpg.key|sudo apt-key add -
If you are using Ubuntu 16.04 (Xenial) then you can simply do this:
sudo apt-add-repository "deb http://apt.llvm.org/xenial/ llvm-toolchain-xenial-3.9 main"
sudo apt-get update
For other flavors of Linux, you can get more instructions from http://apt.llvm.org/.
Then run the following:
sudo apt-get update
sudo apt-get install clang-3.9 clang++-3.9
Note: On Ubuntu 16.04 you may be missing libjsoncpp0 which is no longer available in the package manager, you can download the relevant package here and install with the command:
sudo dpkg -i libjsoncpp0_0.6.0~*.deb
Make clang 3.9 as the default version by the command:
sudo update-alternatives --install /usr/bin/clang clang /usr/bin/clang-3.9 60 --slave /usr/bin/clang++ clang++ /usr/bin/clang++-3.9
- Geoid Model dataset - install this package in your global packages that is common for your entire machine.
wget https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts/install_geographiclib_datasets.sh
sudo chmod +x install_geographiclib_datasets.sh
./install_geographiclib_datasets.sh
- Git clone this
publishAirsimImgsrepository into your catkin workspace
cd ~/catkin_ws/src/
git clone git@github.com:aravindk2604/publishAirsimImgs.git
cd ~/catkin_ws
catkin_make
- Install MessagePack RPC for Python
# MessagePack RPC for Python
pip install msgpack-rpc-python
- Install Python Airsim APIs
# AirSim APIs
pip install airsim
- Run Unreal Engine 4.18
- Open Blocks simulation environment
- Run roscore in a terminal and make sure to have multiple terminal windows
roscore
- Run MAVROS
Make sure to change the udp parameter inside the
mavrosAirsim.launchto have the same ip as your machine (assuming Unreal and AirSim runs on your machine) Inside your catkin workspace where you have thepublishAirsimImgspackage
source devel/setup.bash
roslaunch airsim_img_publisher mavrosAirsim.launch
- Run pubImages.launch after changing the
Airsim_ip's default value to reflect your machine's ip address.
roslaunch airsim_img_publisher pubImages.launch
- To run the Python-based Airsim interface, run the following instead of pubimages.launch:
rosrun airsim_img_publisher airsim_iface.py
- Run the TurtleBot's teleop node to control the car in the AirSim environment. Note, you will need the ros-kinetic-turtlebot package for this.
roslaunch turtlebot_teleop keyboard_teleop.launch
- Run the built-in ROS depthimage_to_laserscan node to convert the depth images coming from the AirSim virtual depth camera into laser scan data:
roslaunch airsim_img_publisher laserscan.launch
- Run the built-in ROS point_cloud_xyzrgb nodelet to convert the depth images coming from the AirSim virtual depth camera into point cloud data:
roslaunch airsim_img_publisher pointcloud.launch