Final year BTech Degree Project
This project aims to enhance the cleaning efficiency of robot by handling the litter waste materials like food-containers, plastic bottles etc. within the floor by the help of robotic arm and seggregate the waste materials like biodegradable and non biodegradable to the basin attached to the robot.
- Built prototyoe model equipped with robotic arm, LiDAR and YOLOv8 based image detection.
- Shortlisted for Centre for Engineering Research and Development (CERD) funding.
- Currently enhancing the robot’s mapping and navigation capabilities using the SLAM Toolbox, the ROS 2 Navigation framework, and sensor fusion.
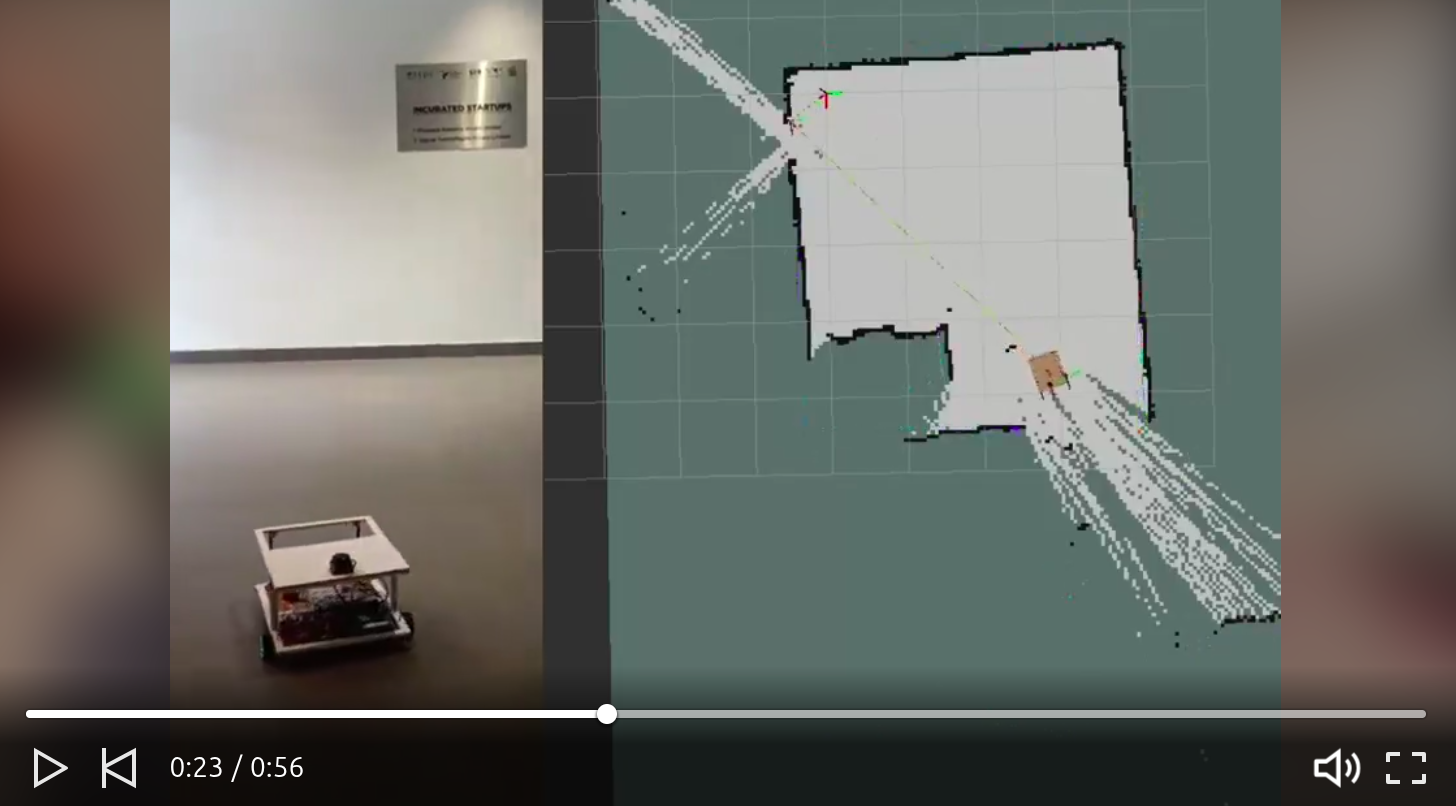 Video 1: Mapping of a room using SLAM toolbox.
Video 1: Mapping of a room using SLAM toolbox.
 Figure 1: a). Diamensions & Drawing, b). 3D Design.
Figure 1: a). Diamensions & Drawing, b). 3D Design.
 Figure 2: a). Frame Design, b). Unified Robot Description Format (URDF) in RViz.
Figure 2: a). Frame Design, b). Unified Robot Description Format (URDF) in RViz.
 Figure 3: Mapping.
Figure 3: Mapping.
 Figure 4: Navigation.
Figure 4: Navigation.
- Data Preprocessing and Standardization
- GMM-based Synthetic Data Generation
- Model Training and Hyperparameter Tuning
- Model Evaluation using MSE and R² Score
- SHAP Analysis for Feature Importance
 Figure 5: Phase 1, Project Works.
Figure 5: Phase 1, Project Works.
- ROS 2
- micro-ROS
- YOLOv8
- LiDAR
- SLAM Toolbox
- Nav2
- The future scope of SWEEBO lies in integrating cognitive robotics, enabling it to perceive, learn, and adapt to dynamic environments for efficient debris collection.
- By leveraging AI, deep learning, and sensor fusion, SWEEBO can enhance object detection, autonomous navigation, and decision-making.
Developed as part of Major Project work at TKM College of Engineering, Kollam (2025).